Robotique LIRMM Languedoc-Roussillon - R2LR
Plateforme de Robotique de manipulation

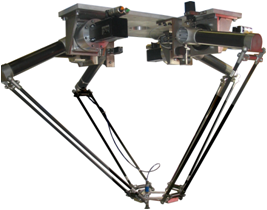





Pour une localisation spatiale précise de cibles.
type : K600
marque : Metris