
Le module image vous est proposé par le projet ICAR (image et interaction)



| .......
Module Image ....... Le module image vous est proposé par le projet ICAR (image et interaction) |
|
|
|
 Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. Benjamin
Gilles, LIRMM, département
robotique. 04 67 41 85 43.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. Benjamin
Gilles, LIRMM, département
robotique. 04 67 41 85 43.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |


 : Pour vous connecter sur la
page institutionnelle de l'intervenant
: Pour vous connecter sur la
page institutionnelle de l'intervenant  : Pour récupérer une
présentation (lorqu'elle nous a été transmise)
: Pour récupérer une
présentation (lorqu'elle nous a été transmise)  lundi 28
avril - 9h00-12h00 : Analyse et modélisation de visages. Pascal BOURDON - Laboratoire XLIM - Université de Poitiers - Pascal.Bourdon@univ-poitiers.fr
lundi 28
avril - 9h00-12h00 : Analyse et modélisation de visages. Pascal BOURDON - Laboratoire XLIM - Université de Poitiers - Pascal.Bourdon@univ-poitiers.fr| L’analyse
et l'extraction automatique de caractéristiques ou de traits de visages
est un sujet de recherche très actif, qu’on retrouve dans de nombreux
domaines applicatifs : biométrie, e-learning, aide au pilotage,
télécommunications à très bas débits (clones synthétiques), jeux
vidéos, création de contenu, etc. Des algorithmes performants nous
permettent aujourd’hui de représenter, en un minimum de paramètres,
associés à un modèle de maillage texturé déformable, les différentes
variations liées à des changements d’identité, d’expressions faciales,
ou encore aux mouvements globaux d’un visage dans une séquence vidéo. Au cours de cette conférence, nous nous intéresserons aux théories et aux outils algorithmiques utilisés dans ce contexte. Plus particulièrement, nous aborderons les notions d’analyse structurelle dans une image (descripteurs de Haar, opérateurs différentiels…), d’apprentissage automatique (Boosting, machines à vecteurs de supports), d’analyse statistique (modélisation et approximation par analyse en composantes principales), et de suivi d’objets (estimation de flot optique). Enfin, nous présenterons des exemples d’application en reconnaissance d’expressions faciales et animation d’avatars de synthèse. |
 |
lundi 28
avril - 14h00-17h00 : Analyse et reconnaissance de maillages 3D. Jean-Philippe Vandeborre - TELECOM Lille - jean-philippe.vandeborre@telecom-lille.fr| L'utilisation
de modèles tridimensionnels dans les applications multimédia, prend de
l'ampleur de jour en jour. Le développement des outils de modélisation,
des scanners 3D, des cartes graphiques accélérées, du Web3D, etc. ouvre
l'accès à des données tridimensionnelles de grande qualité. Les
besoins, sans cesse croissants, concernant ce type de données, changent
rapidement. S'il devient de plus en plus facile de créer de nouveaux modèles 3D, qu'en est-il du traitement et de l'analyse de ces modèles après leur création ? De nos jours, le concepteur d'objets 3D ne pose plus la question : « Comment créer un nouvel objet 3D ? », mais plus vraisemblablement « Comment retrouver un modèle 3D similaire à ceux en ma possession pour le réutiliser ? » et « Comment retrouver la structure d'un modèle 3D maillé sans connaissance a priori sur celui-ci ? » Après un rappel général sur les maillages tridimensionnels et les verrous scientifiques du domaine de l'analyse/reconnaissance, j'exposerai les principales approches de l'état de l'art, avec une attention particulière sur les travaux que j'effectue dans l'équipe MIIRE du LIFL (UMR 8022 Lille1/CNRS) : indexation de maillages 3D, reconnaissance à partir de vues 2D, analyse topologique de maillages par graphes de Reeb, et segmentation de maillages 3D par apprentissage. Je terminerai en parlant de la modélisation 3D par l'exemple, sujet d'un projet ANR qui vient de débuter en novembre 2013. |  |
 |
mardi 29
avril - 10h00-13h00 : Différentes facettes de la Biométrie. Amine Nait-Ali - Laboratoire Images, Signaux et Systèmes Intelligents - naitali@univ-paris12.fr| Dans
son contexte spécifique, la biométrie consiste à extraire les
caractéristiques physiques ou comportementales des personnes afin de
les identifier ou de les authentifier. Au sens large, la biométrie peut
être appliquée dans des domaines dépassant le cercle sécuritaire. A
titre d'exemple, on peut citer, entre autres, le domaine médical ou
celui des jeux vidéo. L'objectif de ce cours consiste à sensibiliser les étudiants à la biométrie en introduisant les différentes modalités existantes ainsi que leurs applications. Un intérêt particulier sera porté à la reconnaissance faciale par approches globales et locales. |  |
 | Dans la deuxième partie de ce cours, on s'intéresse en particulier à l'introduction d'une nouvelle vision de la biométrie, appelée biométrie cachée "Hidden biometrics". Le principe de la biométrie cachée consiste à exploiter les caractéristiques intrinsèques du corps humain à des fins d'identification. Particulièrement robustes aux attaques, la biométrie cachée nécessite la manipulation de données que l'on peut extraire à partir de signaux ou d'images, habituellement utilisés dans le domaine médical. Ainsi, nous aborderons dans ce cours certaines approches utilisant, entre autres, le signal physiologique, les images à Résonnance Magnétique Nucléaire (RMN), ou les images à Rayon-X. |
Mardi 29
avril - 15h00-18h00 : Vision sous-marine. Jan Opderbecke et Aurélien Arnaubec - IFREMER - Centre de Méditerranée - jan.opderbecke@ifremer.fr| Les
images optiques sous-marines représentent une source d’information
essentielle pour les sciences de la mer et plus particulièrement la
cartographie des habitats, l’analyse de la biodiversité, la description
des écosystèmes et les investigations géophysiques des fonds marins. La production des données optiques nécessitent des modules instrumentaux intégrés sur des engins télé opérés ROV ou autonomes AUV. Ces modules consistent en des caméras vidéo ou appareils photo numériques à haute sensibilité intégrés dans des conteneurs résistant à la pression munis de hublots en verre à qualité optique gérant le changement d’indice; ils requièrent des projecteurs de lumière de type HMI, quartz-ions ou LED avec une composition spectrale maitrisée. |
 |
| Les données de
navigation du porteur, la géométrie des instruments, et les paramètres
des prises de vue doivent être enregistrés pour permettre une
exploitation scientifique. La
qualité des données optiques acquises en mer n’est pas optimale. En
effet cette qualité est fonction, sur le plan technique, des
performances du capteur et de l’éclairage ainsi que de la géométrie
d’installation des dispositifs sur l’engin. |
 |
| La limitation majeure de la qualité d’image dépend cependant des propriétés optiques du milieu sous-marin et de la distance qui sépare le capteur de la scène observée. Plus particulièrement, les images sous-marines sont perturbées pas différents phénomènes tels que l’atténuation de l’intensité lumineuse en fonction de la longueur d’onde (domination des couleurs bleu-vert dès quelques mètres de distance), le voile jeté par la rétrodiffusion de la lumière dans la colonne d’eau (des photons sont réfléchis dans le volume d’eau et n’atteignent pas la scène), les reflets provoqués par des particules en suspension ‘neige sous-marine’, et par les artefacts du au champ inhomogène d’éclairage. |  |
| Confrontée à ces perturbations et en comparaison à l’optique dans le milieu aérien, l’imagerie optique sous-marine a des performances limitées et nécessite des traitements de correction dans le cadre exploitation scientifique quantitative. Par ailleurs, la compréhension de l’environnement profond ne peut plus se contenter aujourd’hui d’images optiques isolées. Les images doivent être positionnées, orientées et dimensionnées dans l’espace géographique afin de permettre une exploitation quantitative. La navigation du vecteur, par des dispositifs acoustiques et inertiels, est primordiale pour le géo-référencement des images d’une plongée ainsi que pour la mise en relation d’images et données de différentes plongées voir de différentes campagnes et de différents supports. |  |
| La faible taille de
l’empreinte d’une image sur le fond, limitée par la visibilité et le
champ éclairé, crée le besoin d’assembler en mosaïques les images pour
créer des représentations visuelles sans limitation de taille. En
réalisant des mosaïques géo-référencées, on parle alors de cartographie
optique en compléments des sonars et sondeurs acoustiques, qui sont
historiquement utilisés pour cartographier les fonds. La cartographie
optique peut être définie en 2D ou sous forme d’une reconstruction 3D. Nous présenterons les principaux types d’engins sous-marins utilisés à l’Ifremer, les instruments et charges utiles qui produisent les données sur ces engins, et les techniques de positionnement et de navigation. Dans une deuxième partie, nous abordons les caractéristiques des images sous-marines et des solutions traitement retenus. Nous allons présenter en particulier les méthodes utilisées pour les cartographiques optiques 2D et 3D. |
 |
Mercredi 30
avril - 9h00-12h00 : Objets graphiques 2D, 3D, ... et leur utilisation pour la segmentation et la simulation. Guillaume Damiand - LIRIS - UCBL - guillaume.damiand@liris.cnrs.fr| Les
cartes combinatoires sont des modèles combinatoires permettant de
décrire et de manipuler des subdivisions de l'espace en dimension
quelconque. L'objectif de cet exposé est de montrer l'apport de
l'utilisation de ces modèles, en utilisant pour cela différents travaux
réalisés en informatique graphique: traitement d'images 2D/3D,
modélisation géométrique, simulation... La première partie de cette conférence proposera une présentation générale des cartes combinatoires et des opérations de base. Un des intérêts des cartes est de décrire la topologie des objets représentés. Pour illustrer cet intérêt, nous présenterons quelques invariants topologiques et les algorithmes permettant de les calculer. |
 |
| Nous montrerons ensuite comment sont utilisées les cartes afin de représenter des partitions d'images 2D et 3D, puis comment il est possible de développer des opérations de traitement d'images, par exemple de segmentation, utilisant ces modèles. Nous illustrerons l'utilisation possible des invariants topologique au sein des algorithmes de segmentation. Comme deuxième exemple d'application, nous montrerons l'utilisation des cartes combinatoires pour mettre en oeuvre une méthode générique de simulation physique. |
Mercredi 30
avril - 14h00-17h00 : Tomographie d’émission mono-photonique –
application au dépistage et à la caractérisation de la pathologie
coronarienne sévère. Fayçal Ben Bouallègue - CHU Laperyronie - Medecine nucleaire - faybenb@hotmail.com
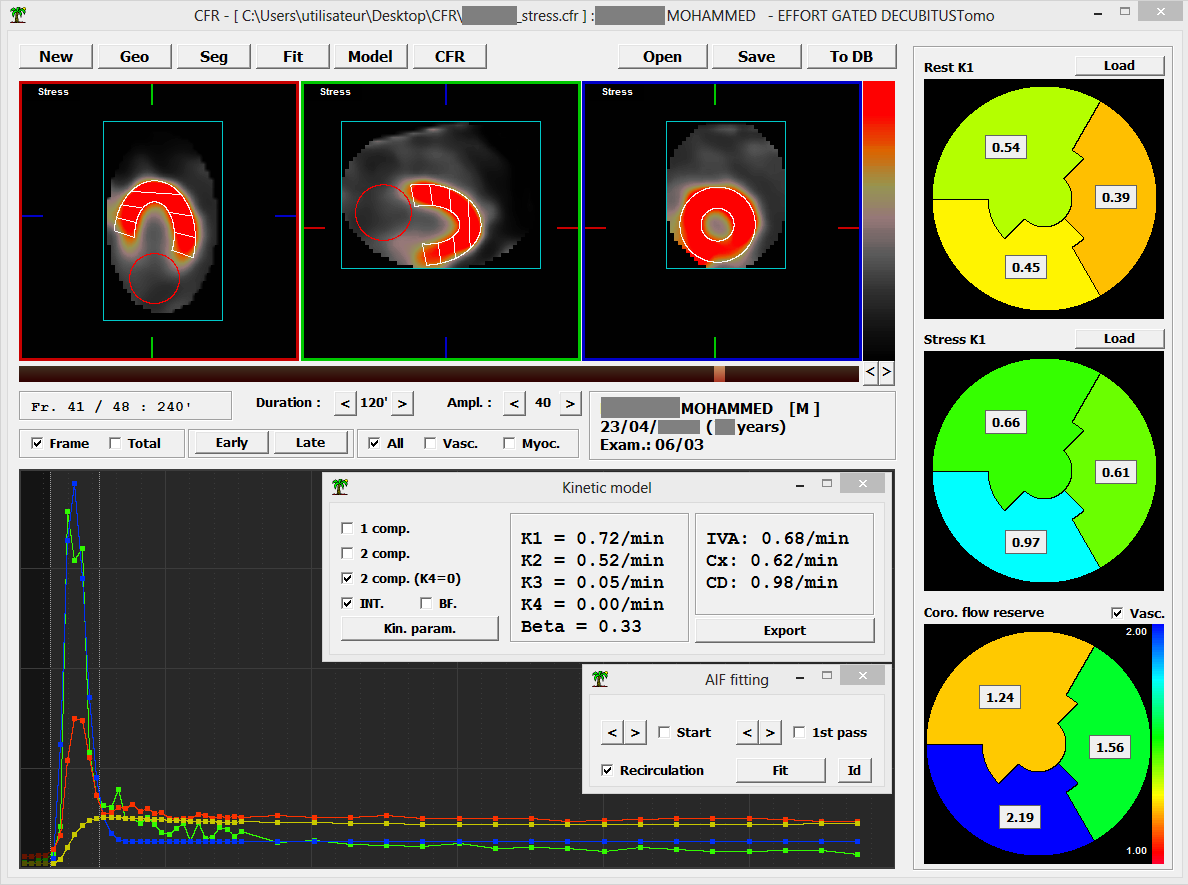
| Tomographie
d’émission mono-photonique – application au dépistage et à la
caractérisation de la pathologie coronarienne sévère. L’exposé
s’attachera à décrire comment l’on peut en routine clinique, à partir
de l’étude du devenir de traceurs radioactifs dans l’organisme humain,
produire une information métabolique et fonctionnelle pertinente d’un
point de vue diagnostique et/ou pronostique. • Dans la première partie, on rappellera les principes physiques et mathématiques de la reconstruction tomographique, en particulier dans le cadre de l’imagerie d’émission mono-photonique : acquisition, formalisation du problème inverse, modélisations analytique et algébrique, considérations statistiques, méthodes de régularisation. • La seconde partie tentera d'expliciter comment, grâce aux progrès récents en matière d’instrumentation, il devient possible de réaliser de l’imagerie dynamique en cardiologie isotopique. L’enjeu étant, à partir d’un modèle pharmacocinétique adapté, de dégager une information quantitative à propos de la perfusion du muscle cardiaque afin de guider au mieux la prise en charge thérapeutique de patients pour lesquels la scintigraphie myocardique classique trouve naturellement ses limites. |
 |
 |