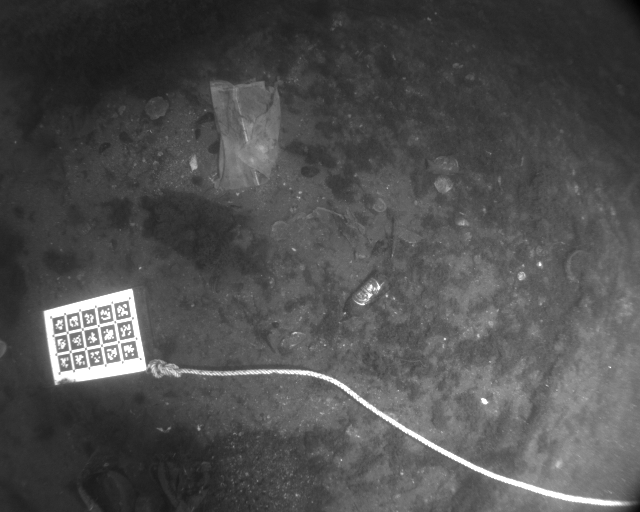
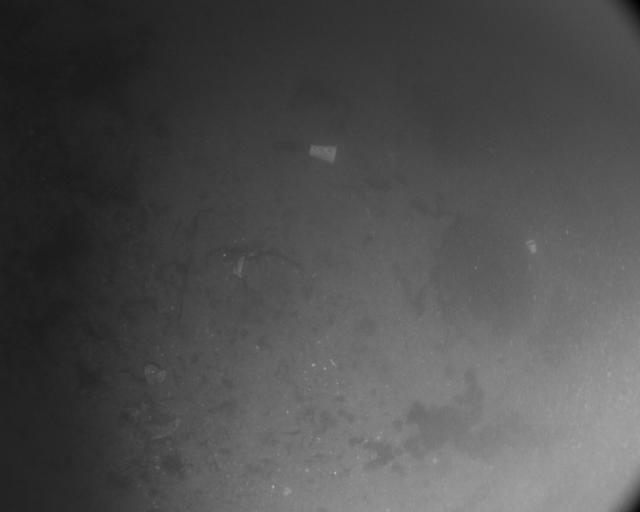
Harbor Sequences
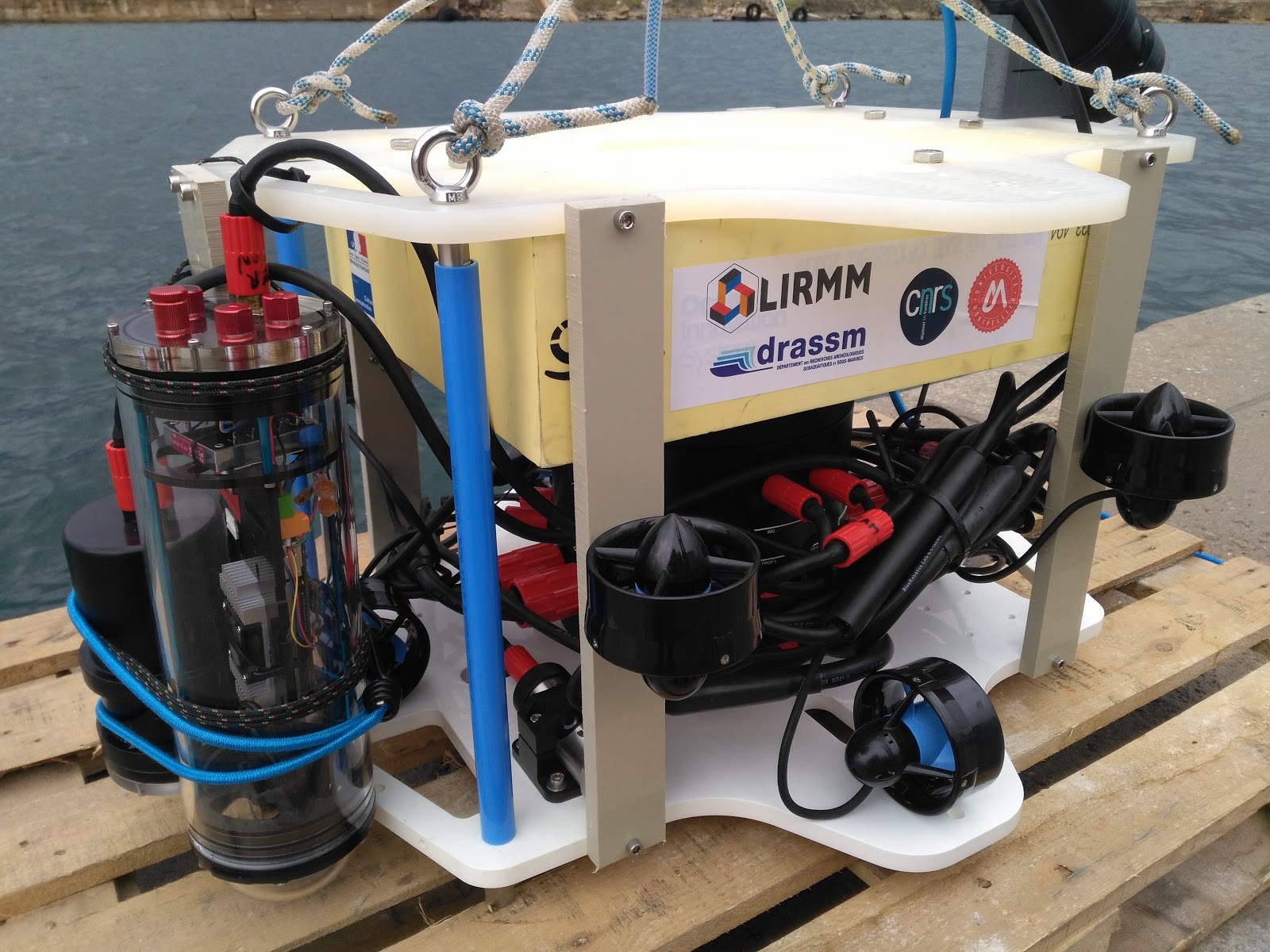
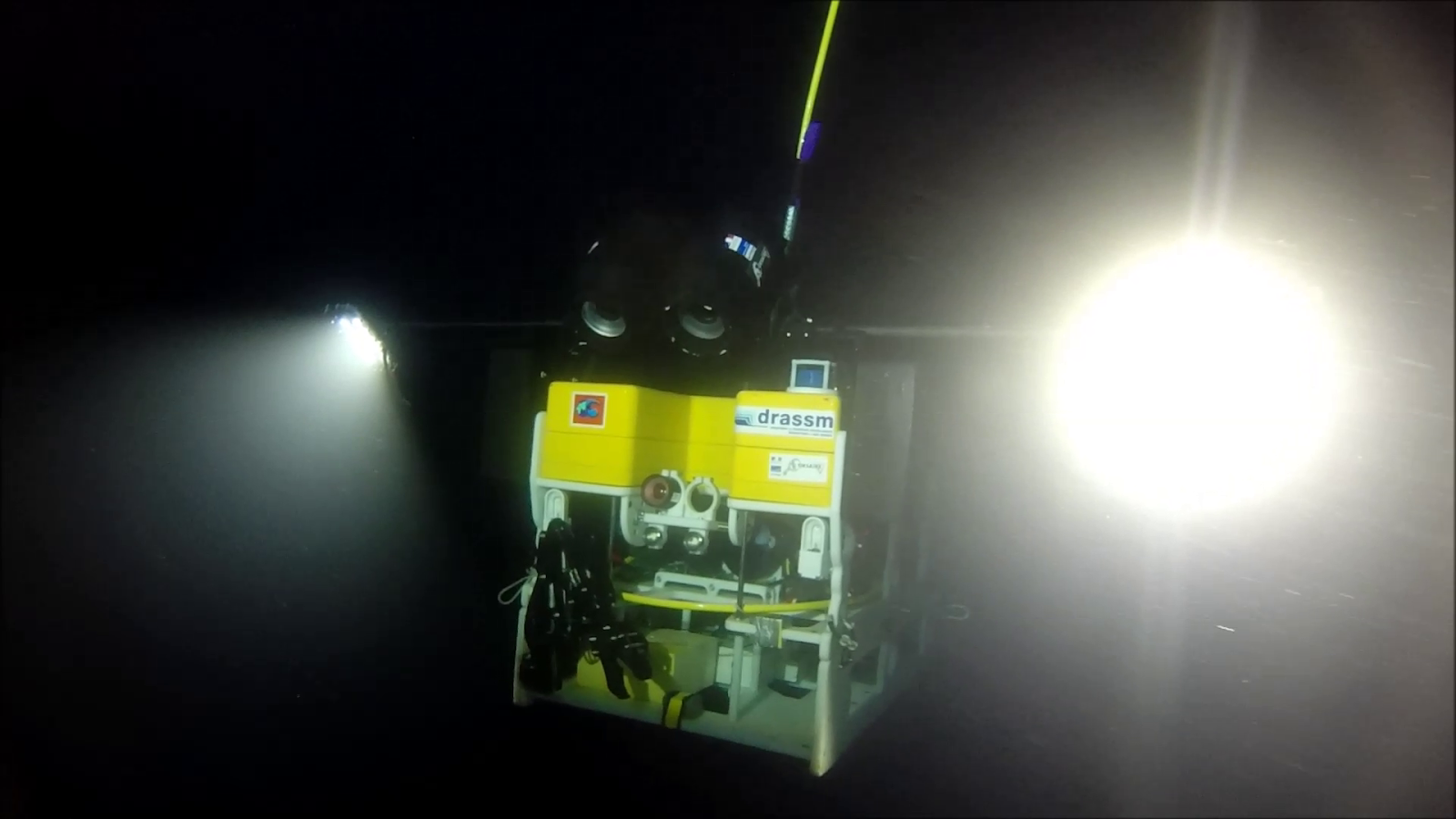
Remotely Operated Vehicle -Dumbo
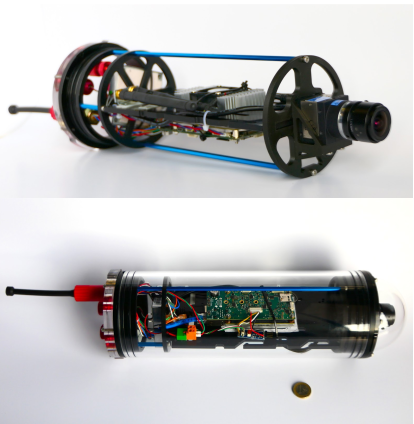
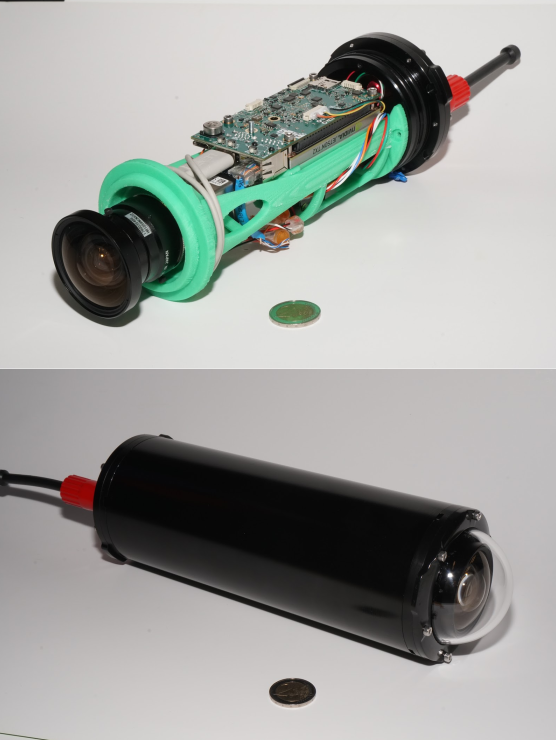
AQUALOC is an underwater dataset dedicated to the localization of underwater vehicles navigating close to the seabed. The sequences of this dataset have been recorded from Remotely Operated Vehicles equipped with a monocular monochromatic camera, a MEMS-IMU and a pressure sensor, embedded in a single enclosure. All the sensors measurements have been synchronously recorded on a Jetson TX2 computing board, running Ubuntu 16.04 and ROS. Each dataset is available in the ROS bag format and as raw data.
These data have been recorded in three different environments: an harbor at a depth of a few meters, a first archaeological site at a depth of 270 meters and a second one at a depth of 380 meters.
The technical details of this dataset are presented in the following paper, published in 2019 in the International Journal of Robotics Research :
AQUALOC: An Underwater Dataset for Visual-Inertial-Pressure Localization
Maxime Ferrera, Vincent Creuze, Julien Moras, Pauline Trouve-Peloux
IJRR International Journal of Robotics Research, SAGE Journals, Oct. 2019.


Ferrera M., Creuze V., Moras J., Trouvé-Peloux P.
ONERA (DTIS) & LIRMM (Univ. Montpellier - CNRS)
This work was partially supported by the CNRS (MITI - Instrumentation aux limites 2018 - Aqualoc Project), in partnership with the DRASSM (Department for Underwater Archaeology of the French Ministry of Culture).
