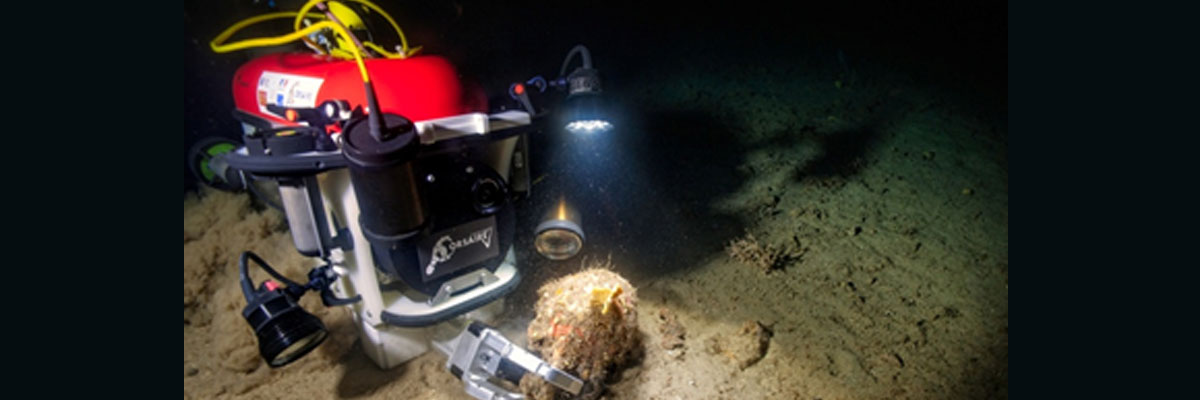
 The Speedy robot sampling a 17th century bottle with its Techno Concept robotic hand (Lune shipwreck, 90 meter deep, Toulon, France). Copyright: DRASMM/Images Explorations – F. Osada / T. Seguin
The Speedy robot sampling a 17th century bottle with its Techno Concept robotic hand (Lune shipwreck, 90 meter deep, Toulon, France). Copyright: DRASMM/Images Explorations – F. Osada / T. Seguin
Underwater robotics for deep-sea archaeology
Since 2013, the Corsaire Concept Project has focused
on the development of new tools and methods for
deep underwater archaeology (from 50m to 2,000m).
This project is led by the DRASSM (Département
des Recherches Archéo-logiques Subaquatiques et
Sous-Marines, French Ministry of Culture’s Department
for Underwater Archaeology). LIRMM coordinates the
robotic activities of this project and collaborates with
several laboratories (Stanford Robotics, Institut PPrime,
Onera DTIM, ENSTA Bretagne) and SMEs (Techno
Concept, Becom-d, SIT, Copetech SM, Images Exploration).
Several new robotic tools and methods have
been introduced and tested under the supervision of
the archaeologists.
Most of the tests are conducted at
a depth of 90 meters, on the Lune shipwreck, a French
warship in Louis XIV’s navy which sank in the Mediterranean
Sea in 1664, a few nautical miles from Toulon,
France. The robotic concepts that successfully pass the
Lune tests are tested on deeper shipwrecks, like antic
shipwrecks (500m deep) or the Danton battleship
shipwreck (year 1916, 1,025m deep).
In this project, we work on manipulation, control,
vehicle coordination, and computer vision for localization
and modeling. For instance, in 2014, Speedy, a
LIRMM robot, demonstrated the ability to grasp fragile
artefacts with the Techno Concept underwater robotic
hand combined with accurate localization and control.
In 2015, Speedy and Leonard, LIRMM’s underwater
robots, were coordinated to operate simultaneously
on the Lune shipwreck. In 2016, Leonard was used on
the Lune shipwreck in collaboration with Stanford’s
robotic diver Ocean One for its very first dive at sea.
Since then, the two robots have become regular
dive companions. Stanford’s Ocean One is the only
underwater robot piloted with haptic devices, enabling
the pilot to feel what the robot’s arms feel.
This project is funded by ANR, CNRS PICS, Région Occitanie,
FEDER, Call France-Stanford, DRASSM.