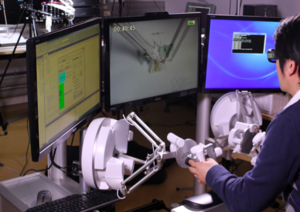
LIRMM's translationnal surgical robotics research platform @ Montpellier Medical School, France
LIRMM's translationnal surgical robotics research platform @ Montpellier Medical School, France
Le Robotique Chirurgicale au LIRMM
Le groupe Robotique Médicale du LIRMM mène des activités de recherche sur la robotique médicale et plus spécifiquement sur la modélisation, la conception et le contrôle des robots et des dispositifs médicaux depuis plus de 25 ans :
développement des robots médicaux « Hippocrate » (installé à l'hôpital Broussais en 1998) et « Dermarob » 2002 (prix de l'innovation ADER-LR 2003), création de la Startup AcuSurgical (Grand Prix d’innovation i-Lab 2020),
organisation de l'école d'été de robotique chirurgicale à Montpellier depuis 2003, obtention de plusieurs prix et distinctions scientifiques dans le domaine (IROS Best Application Paper Awards Finaliste en 2009,
MICCAI Media Best Paper Award 2011, prix du GDR pour la meilleure thèse de robotique en 2016, Best Poster Award au Hamlyn Symp. 2019, ...).
Le groupe Robotique Médicale a de fortes collaborations avec des cliniciens de la région (CHU Montpellier & Nîmes, institut du Cancer de Montpellier (ICM)) et dispose d'un emplacement stratégique à la faculté de médecine de Montpellier
où il mène des activités de recherche translationnelle. Il a de nombreuses collaborations avec les industriels du domaine et une forte activité de transfert industriel (thèses CIFRE, contrats de collaboration et d’exploitation,
créations de Start-ups, ...). Il a notamment un accord d'exploitation avec une société de robotique chirurgicale (société Sterlab) et est co-fondateur d’une start-up en robotique chirurgicale (AcuSurgical).
Enfin, il dirige un Programme de Recherche International (IRP) labellisé par le CNRS entre le LIRMM et l’Université de Stanford (depuis 2019).
Le groupe Robotique Médicale du LIRMM possède un Plateau Technique de Robotique Chirurgicale (RobChir) situé à la faculté de médecine (soutenue financièrement par l'Equipex Robotex, le CNRS - plateforme R2H - l'Université de Montpellier et
la Région Occitanie) qu’il met à disposition à la communauté scientifique nationale (membres de l’EquipEx Robotex et du Labex CAMI) et aux partenaires industriels pour diffuser et exploiter les développements de ses recherches.