 Projets autour de RobChir
Projets autour de RobChir
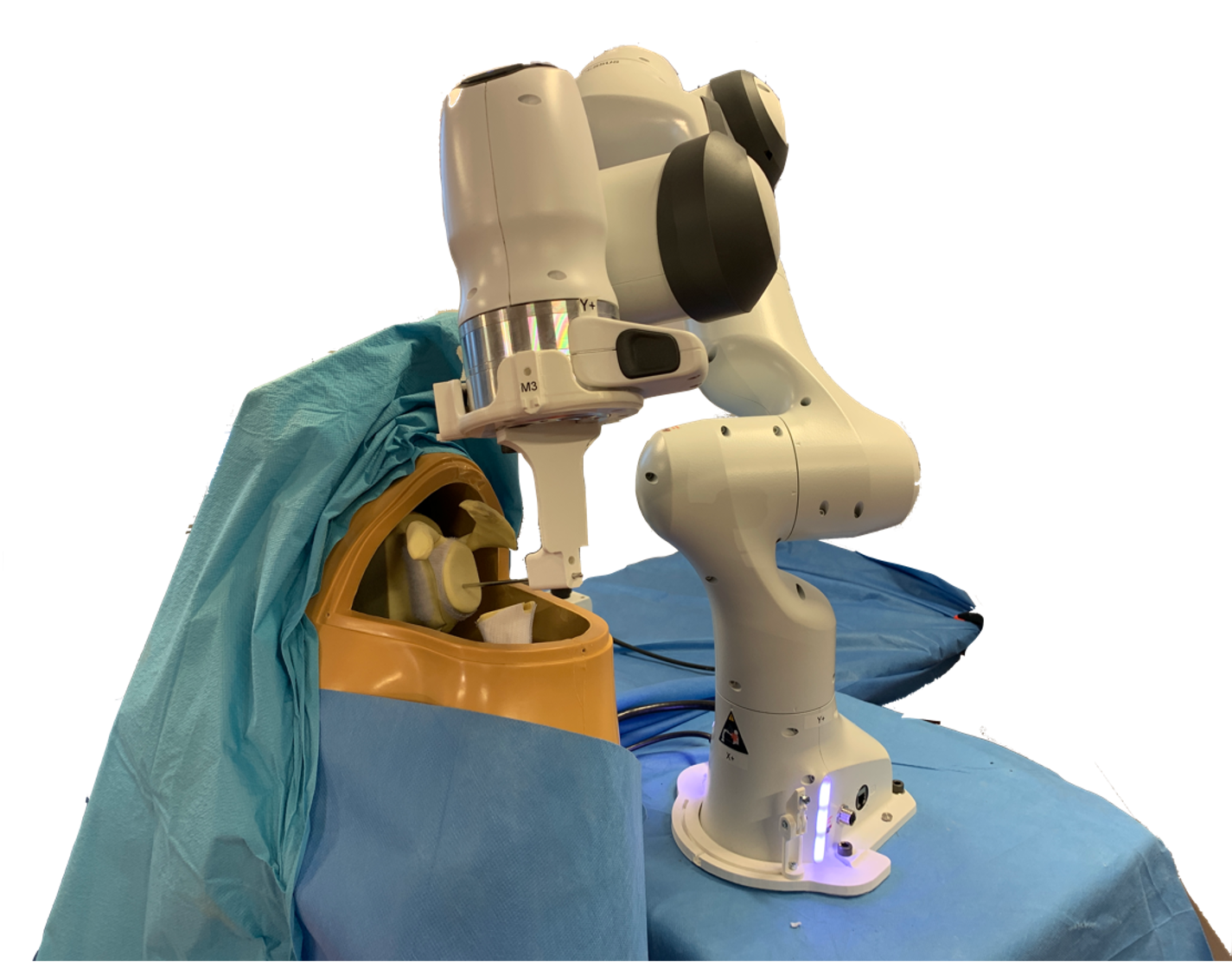
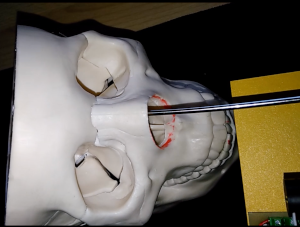
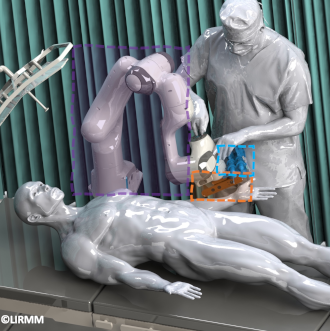
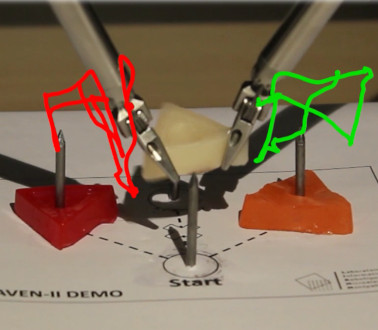
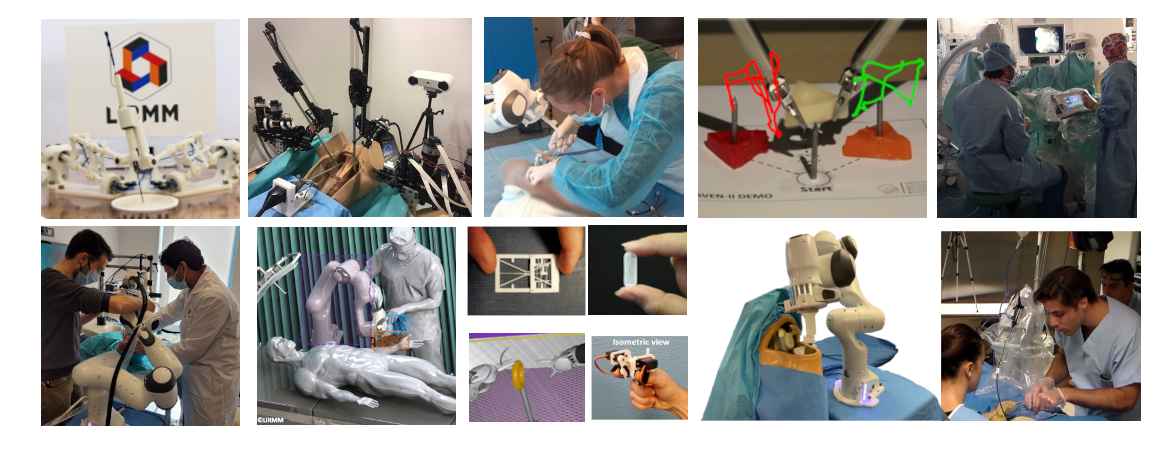
Les activités de recherche liées au plateau Technique RobChir sont focalisées sur la conception et la commande de dispositifs médicaux, l'assistance aux gestes chirurgicaux, l'apprentissage et l'évaluation du geste et également sur le guidage du geste par réalité augmentée et par capteurs (vision, retour de force, etc.). Ils sont développés en collaboration étroite avec les praticiens hospitaliers et les équipes de recherches cliniques des différents CHU régionaux, nationaux et internationaux (CHRU de Montpellier, Nîmes, Grenoble, Pise, Dundee, etc.) et de l'INSERM. Toutes ces activités sont conduites avec un objectif de valorisation et de transferts clinique et industriel. Ces travaux font ainsi l’objet de réalisation de prototypes (logiciel et/ou mécatronique) et sont validés expérimentalement en laboratoire et, le cas échéant, avec des études pré-cliniques ou cliniques (validations in-vitro sur fantômes, ex-vivo ou bien encore sur cadavre). Ces activités ont pour champ d’applications, la chirurgie mini-invasive et endoluminale robotisée, la radiologie interventionnelle ou bien encore l'apprentissage et l'évaluation du geste chirurgical robotisé. Quelques exemples de ces activités sont donnés ci-après.