Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |


 Nouveau !! si vous voulez récuperer les
présentations, cliquez sur le Lyon jouxtant l'exposé qui
vous intéresse.
Nouveau !! si vous voulez récuperer les
présentations, cliquez sur le Lyon jouxtant l'exposé qui
vous intéresse. Atilla
Baskurt - LIRIS, Lyon - atilla.baskurt@liris.cnrs.fr
Atilla
Baskurt - LIRIS, Lyon - atilla.baskurt@liris.cnrs.fr  |
Cette conférence trace l'historique de l'évolution de la recherche dans ce domaine sur les quinze dernières années. La compression des données numériques constitue le fil conducteur de l'exposé. Les normes existantes sont présentés de manière à figer des instantanés dans cette historique sur les méthodologies et les domaines d'application. |
François Berry - LASMEA,
Clermont-Ferrand - berry@lasmea.univ-bpclermont.fr |
Les technologies
liées à l'imagerie ont beaucoup évoluées
ces dernières
années avec la réduction des coûts de fabrication
et l'avènement des
techniques de fabrication CMOS. Dans ce contexte, il semble primordial
de connaître ces différents technologies afin de pouvoir
en comparer
les avantages et inconvénients. A travers cet exposé, on se propose dans un premier temps de rappeler quelques règles de physique permettant de comprendre les phénomènes de photoconduction, création de photocourant, etc... Dans un second point, nous aborderons les structures silicium mettant en oeuvre ces phénomènes. Une brève introduction sur les principes de microélectronique nous permettra de présenter les différents types de pixels existant à l'heure actuelle. Une place particulière sera donnée aux procédés permettant de percevoir la couleur. Dans une troisième partie, seront abordées les notions d'imageurs CCD, CID, CMOS,... Nous-nous focaliserons particulièrement sur les caractéristiques de ces différents imageurs ainsi que leurs performances. En dernier lieu et en guise de conclusion, une introduction aux caméras dites " intelligentes " (smart vision sensor) sera proposée. |
Adrien Bartoli - LASMEA, Clermont-Ferrand - Adrien.Bartoli@univ-bpclermont.fr
 |
La vision 3D non calibrée
à pour but d'inférer de l'information tridimensionelle
à partir d'images acquises par une ou plusieurs caméras
reliées à un ordinateur. Les applications des techniques
de vision 3D sont multiples : reconstruction de modèles
numériques de bâtiments, création de panoramas,
incrustation d'objets virtuels sur une vidéo
(réalité augmentée), mesure sans contact
(photogrammétrie), etc. Le problème de la vision 3D est
difficile car les positions, orientations, et paramètres
internes (distance focale, etc.) des caméras doivent être
retrouvés, ainsi que la structure 3D de l'environnement. |
 |
La première partie de
l'exposé présente les résultats matures obtenus
à
ce jour dans le domaine, basé sur l'hypothèse d'un
environnement non
déformable. L'approche qui s'est imposée comme standard
ces dernières
années sera présentée en détail et
illustrée à l'aide d'un logiciel de
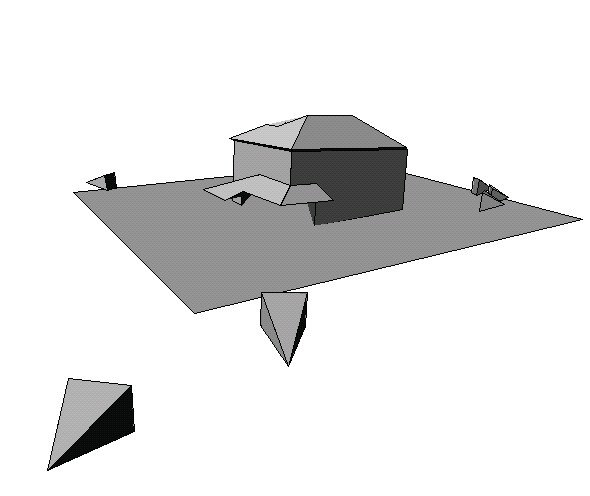
reconstruction 3D. La deuxième partie de l'exposé présente des résultats de recherche récents concernant notamment les environnements déformables. <- Le modèle 3D ci-contre est obtenu à partir de 6 photos ci-dessous. (les triangles symbolisent les positions estimées des caméras). |
 |
 |
 |
 |
 |
 |
Jacques Gangloff - LSIIT, Strasbourg- jacques@eavr.u-strasbg.fr |
Première partie
: Asservissements visuels - Introduction - Classification - Modélisation - Commande |
Deuxième partie
: Applications - Industrielles : * Suivi de cible * Suivi de profilé - Médicales : * Automatisation du geste chirurgical * Compensation de respiration * Suivi de coeur battant |
Troisième
partie : perspectives |
Gilles
Gesquière - LSIS, Marseille - gilles.gesquiere@up.univ-mrs.fr
 |
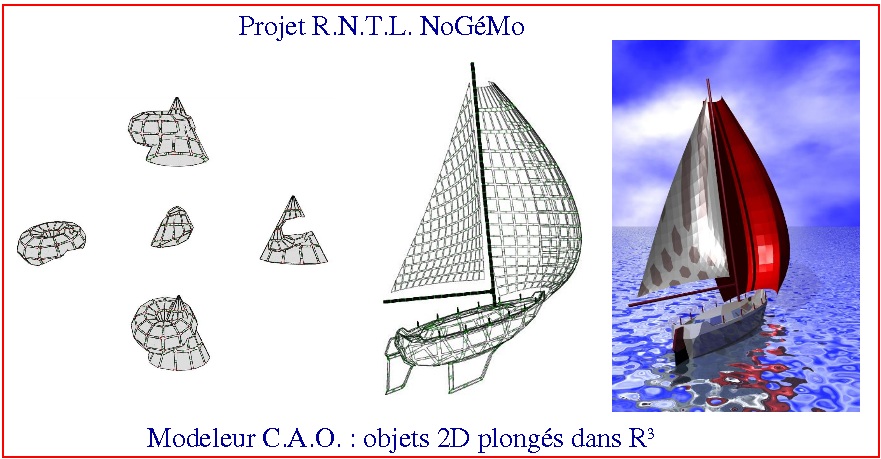
L’image virtuelle est
présente autour de nous dans des domaines comme l’audiovisuelle,
les maquettes virtuelles ou les mondes virtuels temps
réels. L’image est dans la plupart des cas animée et cela
si possible en obtenant une grande interactivité utilisateur
–programme. Dans ce cours, nous reprenons dans un premier temps le processus de construction d’images fixes ou animées à partir de scènes comportant des objets 3D. Nous montrerons ensuite à l’aide de deux exemples les compromis nécessaire entre obtention d’un résultat temps réel et images réalistes (proches du monde réel). |
Eric Andrès - SIC, Poitiers - andres@sic.sp2mi.univ-poitiers.fr