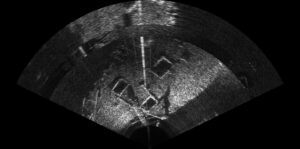
The Shipwreck-Dataset is free and proposes images acquired simultaneously by an underwater monocular camera and a multibeam imaging sonar (acoustic camera), both mounted on an ROV (Remotely Operated Vehicle). The images come also with synchronized pressure (depth) and IMU measurements.
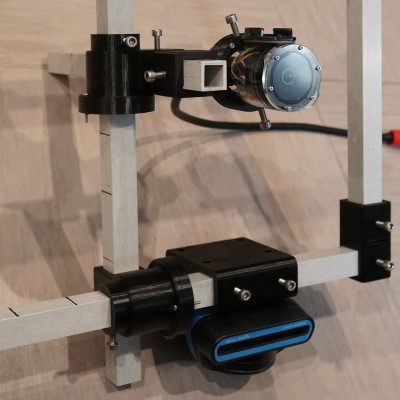
The dataset has been acquired on 4 shipwrecks at depths from 50 to 68 meters, in the Mediterranean sea. Thanks to an adjustable mechanical frame, the dataset includes 3 different configurations for the relative distance and orientation of the video camera with respect to the acoustic camera (fixed).
This frame is attached under the ROV and allows to control the relative distance and orientation of the video camera with respect to the acoustic camera.
Content of the dataset
Types and sizes of the images, sensors data...
The dataset contains 17,572 monocular camera images and 8,577 sonar images. In each folder there is also a sonar_param.txt file containing the range and gain settings of the sonar during the acquisition.
An Excel file summarizes the content of the folders.
Each picture from the camera is associated with the corresponding depth and IMU data, stored in a csv file organized as described below (the camera and sonar indices indicate the indices of the corresponding images’ names) :
depth in m | roll (degree) | pitch (degree) | yaw (degree) | roll speed (m/s) | pitch speed (m/s) | yaw speed (m/s) | sonar index | camera index |
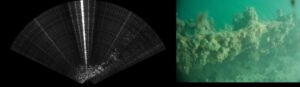
The dataset also contains concatenated pictures, made of an acoustic image on the left and an optical image on the right, both captured synchronously by the system.
How to download the dataset and how to cite us
This dataset can be used freely for any academic purpose. Please cite the reference of the associated paper* :
Nicolas Pecheux, Vincent Creuze, Frédéric Comby et Olivier Tempier, “Self-Calibration of a Sonar–Vision System for Underwater Vehicles: A New Method and a Dataset”, Sensors, 23(3), 1700, Feb. 3, 2023.
* in this paper, you will find more details about the dataset and the description of a self calibration method of the vision-sonar system.
This dataset was made possible thanks to the ARCHOCABLE PhD grant (ALDOCT-000941) awarded by the Occitanie Region (Région Occitanie).
LIRMM : a laboratory of the University of Montpellier (France) and the CNRS (National Center for Scientific Research), Montpellier, France
DRASSM : the National Department of Underwater Archaeology of the French Ministry of Culture
Summary of the dataset
shipwrecks
monocular images
+
acoustic images
+
geometric configurations
We do not use third party cookies but only essential cookies for the working of basic functionalities of the website.
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.