The Shipwreck-Dataset was found to contain several synchronization errors between the video data and the sonar data. We prefer to temporarily remove it in order to make the necessary corrections before putting it back online or releasing a new dataset. We apologize to any colleagues who may have been affected by these synchronization errors.
Acoustic images, monocular vision, IMU and depth
"Basile" ROV
Basile is a 500 m depth rated ROV, developped by LIRMM for the archaeological campaigns of the DRASSM.
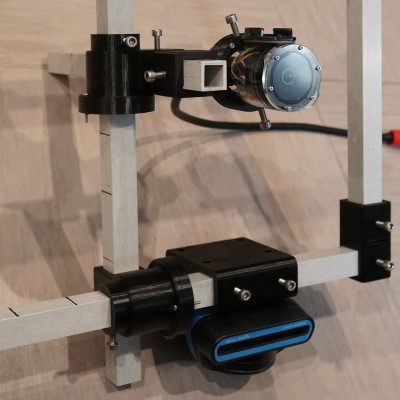
During the acquisition of the dataset, it was equipped with Multibeam Imaging Sonar, a monocular video camera, a Razor M0 IMU and a pressure sensor.
video camera
HBB-30-PA IP camera
1/3” Megapixel progressive scan CMOS sensor
The camera is installed in an anclosure with a flat window.
This frame is attached under the ROV and allows to control the relative distance and orientation of the video camera with respect to the acoustic camera.
We do not use third party cookies but only essential cookies for the working of basic functionalities of the website.
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.