Robotique LIRMM Languedoc-Roussillon - R2LR
Plateforme de "Robotique Humanoïde"
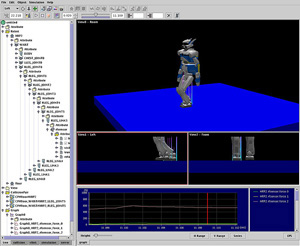 Environnement logiciel de simulation OPENHRP
Environnement logiciel de simulation OPENHRP
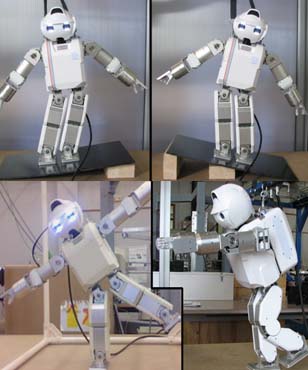 Robot Humanoïde HOAP3
Robot Humanoïde HOAP3
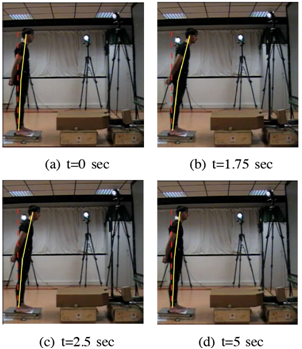 Plateforme d'analyse de mouvement "PRAM"
Plateforme d'analyse de mouvement "PRAM"
en collaboration avec l'Université Montpellier 1