
Le module image vous est proposé par le projet ICAR (image et interaction)

| .......
Module Image ....... Le module image vous est proposé par le projet ICAR (image et interaction) |
|
 Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |


 : Pour vous connecter sur la
page institutionnelle de l'intervenant
: Pour vous connecter sur la
page institutionnelle de l'intervenant  : Pour récupérer une
présentations (lorqu'elles nous a été transmise)
: Pour récupérer une
présentations (lorqu'elles nous a été transmise)  Jeudi 25
janvier 14h00 : Vision du mouvement, vision omnidirectionnelle
: Olivier Strauss - LIRMM,
Montpellier - strauss@lirmm.fr
Jeudi 25
janvier 14h00 : Vision du mouvement, vision omnidirectionnelle
: Olivier Strauss - LIRMM,
Montpellier - strauss@lirmm.fr  |
On nomme
généralement Vision un système de perception
comportant principalement une ou plusieurs caméras
(caméra est pris ici au sens français, c’est à
dire un capteur d’images en mouvement). Les systèmes de vision
sont utilisés en robotique, surveillance, guidage, assistance
à la personne, contrôle de qualité,
médecine, effets spéciaux, etc … Un flot d’image, c’est une masse d’information abondante dont la richesse est souvent peut pertinente par rapport aux applications visées. Pour fixer les idées, 10 secondes de film couleur représente plus de 1 GO de données alors que l’information que l’on veut en extraite pour de la surveillance par exemple est binaire : y-a-t-il ou non un intrus dans la zone surveillée. Dans la plupart des applications que nous avons citées, une des informations les plus recherchée est le mouvement des objets perçus par le système de vision. Par exemple en robotique mobile, cette information peut permettre d’estimer le mouvement du robot par rapport à son environnement, ou encore de repérer des obstacles mobiles ; en médecine le mouvement d’organes vitaux peut être contrôlé par vision ; enfin en cinéma, cette technique a permis l’insertion virtuelle d’objets et la prise d’image virtuelle (ce qui est maintenant connu sous le nom d’effet matrix). Dans cette dernière application ainsi qu’en robotique, les caméras classiques ont tendance à être remplacés par des systèmes plus sophistiqués appelés caméras omnidirectionnelles. L’avantage d’un tel processus est de permettre d’extraire des informations sur 360° autour du système de perception. Au cours de cet exposé, nous proposons de dresser un panorama des techniques les plus couramment utilisées pour extraire l’information de mouvement à partir d’un flot d’images. Nous parlerons aussi des systèmes de vision dits omnidirectionnels en insistant sur ceux permettant de recréer des images perspectives classiques. |
Jeudi 1er
mars 13h30
: Introduction à la protection de
l'information médicale. Gouenou Coatrieux -
LATIM,
Brest - coatrieu@.tsi.enst.fr Adrien
Bartoli - LASMEA,
Clermont-Ferrand - Adrien.Bartoli@univ-bpclermont.fr
 |
La vision 3D non calibrée
à pour but d'inférer de l'information tridimensionelle
à partir d'images acquises par une ou plusieurs caméras
reliées à un ordinateur. Les applications des techniques
de vision 3D sont multiples : reconstruction de modèles
numériques de bâtiments, création de panoramas,
incrustation d'objets virtuels sur une vidéo
(réalité augmentée), mesure sans contact
(photogrammétrie), etc. Le problème de la vision 3D est
difficile car les positions, orientations, et paramètres
internes (distance focale, etc.) des caméras doivent être
retrouvés, ainsi que la structure 3D de l'environnement. |
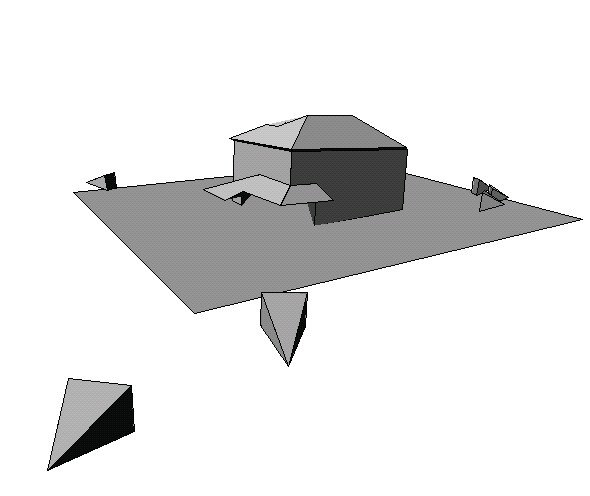 |
La première partie de
l'exposé présente les résultats matures obtenus
à
ce jour dans le domaine, basé sur l'hypothèse d'un
environnement non
déformable. L'approche qui s'est imposée comme standard
ces dernières
années sera présentée en détail et
illustrée à l'aide d'un logiciel de
reconstruction 3D. La deuxième partie de l'exposé présente des résultats de recherche récents concernant notamment les environnements déformables. <- Le modèle 3D ci-contre est obtenu à partir de 6 photos ci-dessous. (les triangles symbolisent les positions estimées des caméras). |
 |
 |
 |
 |
 |
 |
Jeudi 26
avril 14h00 : Image et sécurité : Caroline
Fontaine - IRISA, Rennes - Caroline.Fontaine@irisa.fr Jeudi 24
mai 14h00 : Image et sous-ensemble flous : Isabelle
Bloch - ENST, Paris - Isabelle.Bloch@enst.fr |
Imprécisions et
incertitudes sont inhérentes aux images, et trouvent leur
origine à différents niveaux : phénomènes
observés, capteurs et acquisitions des données, processus
numériques de reconstruction, nature des images et mode de
représentation de leurs éléments constitutifs,
etc. Imprécisions et incertitudes sont ensuite renforcées
dans les primitives extraites des images et sur lesquelles s'appuient
l'analyse et l'interprétation des images. L'intérêt des ensembles flous pour le traitement de l'information en image et vision peut se décliner en particulier selon les quatre aspects suivants : - la capacité des ensembles flous à représenter l'information spatiale dans les images ainsi que son imprécision, à différents niveaux (local, régional ou global), et sous différentes formes (numérique, symbolique, quantitative, qualitative), - la possibilité de représenter des informations très hétérogènes, extraites directement des images ou issues de connaissances externes, comme des connaissances expertes ou génériques sur un domaine ou un problème, - la possibilité de généraliser aux ensembles flous des opérations pour manipuler l'information spatiale, - la souplesse des opérateurs de combinaison permettant de fusionner des informations de multiples natures dans des situations très variées. Ce cours se propose d'illustrer quelques uns de ces aspects. |
Jeudi 31
mai 14h00 : Image et géométrie discrète Eric
Rémy – LSIS Marseille – Eric.Remy@univ-provence.fr |
 |
 |
| Objet discret |
Carte de
distance de l'objet |
Carte de
distance du complémentaire |