
Le module image vous est proposé par le projet ICAR (image et interaction)

| .......
Module Image ....... Le module image vous est proposé par le projet ICAR (image et interaction) |
|
 Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |


 : Pour vous connecter sur la
page institutionnelle de l'intervenant
: Pour vous connecter sur la
page institutionnelle de l'intervenant  : Pour récupérer une
présentations (lorqu'elles nous a été transmise)
: Pour récupérer une
présentations (lorqu'elles nous a été transmise)  Jeudi 31
janvier 14h00 : Modélisation de l’environnement par vision en
robotique mobile. Simon Lacroix - LAAS,
Toulouse - Simon.Lacroix@laas.fr
Jeudi 31
janvier 14h00 : Modélisation de l’environnement par vision en
robotique mobile. Simon Lacroix - LAAS,
Toulouse - Simon.Lacroix@laas.fr 
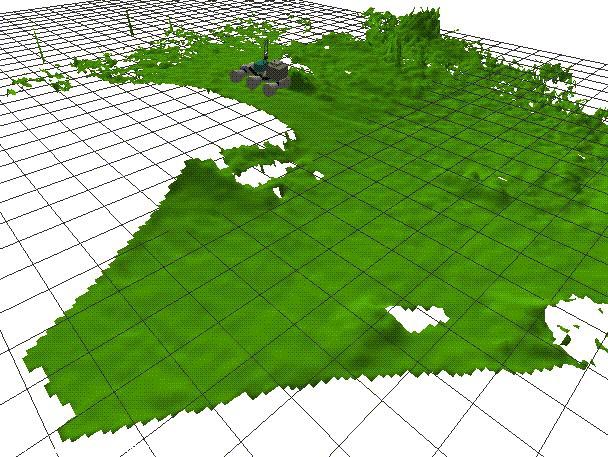
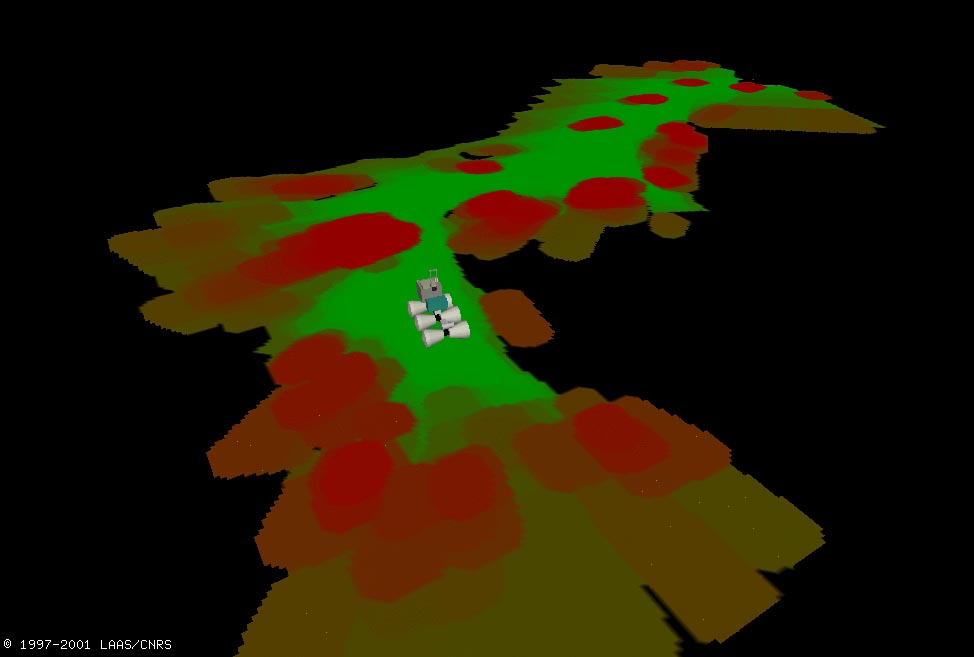
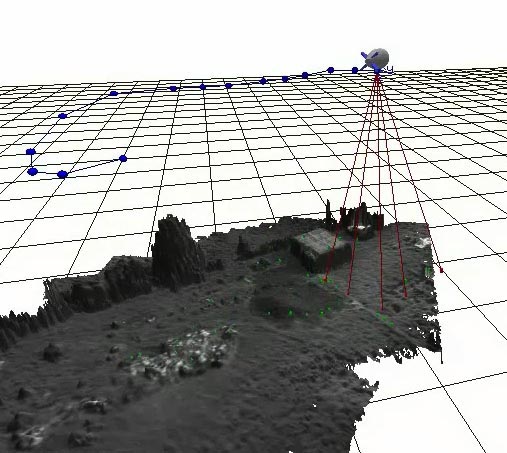
| Pour réaliser de
manière autonome des tâches de déplacement,
d’exploration ou de surveillance, un robot mobile doit disposer de
représentations de l’environnement dans lequel il évolue.
Ces représentations sont de natures diverses selon le type
d’environnement d’une part (intérieurs de bâtiments,
environnements extérieurs urbains ou naturels), et selon les
fonctions qui les exploitent d’autre part (principalement localisation,
planification de trajectoires ou d’itinéraires, contrôle
d’exécution des déplacements). Pour construire ses représentations, les robots son dotés de nombreux capteurs (odomètres, capteurs inertiels, télémetrie, ultrasons...), et en particulier de caméras, selon différentes modalités : vision monoculaire, stéréovision ou vision panoramique. Des traitements de base permettent d’acquérir des images 3D denses par stéréovision, ou d’extraire des points d’intérêt depuis une image en monoculaire ou panoramique, puis de mettre en correspondance ces points entre deux images acquises depuis des positions différentes du robot. L’exposé présentera comment ces techniques sont exploitées pour construire les représentations de l’environnement nécessaires à l’autonomie du robot. En particulier, il insistera sur le lien intime entre modélisation de l’environnement et localisation au sein de cet environnement, et présentera en détail le problème dit de “Localisation et Cartographie Simultanées” (SLAM en anglais). Il sera illustré par des résultats obtenus dans différents contextes, pour des robots terrestres et aériens. |
 |
 |
 |
Jeudi 14
février 14h00
: Stéréovision et mise en correspondance : applications
en télédétection aérienne et satellitaire. Marc Pierrot Deseilligny - Maison
de la téledetection, Montpellier - pierrot@teledetection.fr
 multi-stéréoscopie
sur zone ubaine
|
 couple spot 5 en zone rurale
|
 image de façade urbaine |
 Jeudi 13 mars 14h00 : Image et couleur
: Alain
Trémeau - LIGIV, Saint-Etienne - tremeau@ligiv.org
Jeudi 13 mars 14h00 : Image et couleur
: Alain
Trémeau - LIGIV, Saint-Etienne - tremeau@ligiv.org | Le domaine de l’image couleurs
constitue, à part entière, un secteur de recherche et
développement d’une très grande complexité. En
effet, au-delà de la question « quelles sont les
données qui contribuent fondamentalement à définir
une image couleurs ? » ou de la question « comment se
répercute sur l’image la modification de l’une de ces
données ? », se pose également le problème
de la subjectivité de l’observation visuelle. Pour comprendre comment une image s’est formée (sources d’éclairement, optique, capteur), il est nécessaire de faire appel à la physique. Il en est de même pour comprendre comment certaines interactions lumineuses (phénomènes d’ombrage, de réflexion colorée, de transparence, de constance des couleurs) entre objets ont pu modifier l’image. |
 |
 |
Pour comprendre comment une
image est perçue par un observateur (adaptation chromatique,
contrastes simultanés, apparence couleur, focus d’attention), il
est nécessaire de faire appel à la psychophysique. De
même, pour comprendre comment certains phénomènes
visuels peuvent modifier la perception que l’on a d’une scène,
il est nécessaire de s’intéresser au Système
Visuel Humain (SVH). |
| Pour analyser comment l’image
est constituée (niveau pixel, niveau spatiofréquentiel,
niveau objet, niveau sémantique), il est nécessaire de
faire appel à toute une chaîne d’opérateurs de
traitement d’images (filtrage, segmentation, indexation) qui
eux-mêmes relèvent notamment de la modélisation
mathématique (représentation scalaire ou vectorielle des
données, espaces de représentation couleur). De
même, pour analyser la qualité d’une image (image fixe ou
vidéo, image couleur ou multispectrale), il est
nécessaire de sélectionner (analyse discriminante,
réseau de neurones, apprentissage) parmi tous les descripteurs
image (netteté, contraste, diversité des couleurs) ceux
qui satisfont au mieux au problème posé. Pour prédire comment l’image sera restituée sur un périphérique donné (écran CRT, LCD, HDR, imprimante multiprimaires) il est nécessaire de caractériser au préalable ce périphérique (management des couleurs, domaine des couleurs restituables) en faisant appel notamment à l’électronique et au traitement du signal (numérisation, codage des données, compression, transmission). D’une manière générale, l’image couleurs requiert donc un ensemble de connaissances et de compétences extrêmement large et diversifié. L’objectif de l’exposé sera d’illustrer ces notions à travers différents exemples. |
 |
Jeudi 3 avril 14h00 : Synthèse
d'images et animations: application
à la sculpture virtuelle et à la représentation 3D
de terrains. Gilles
Gesquière - LSIS, Marseille - gilles.gesquiere@up.univ-mrs.fr
 |
L’image virtuelle est
présente autour de nous dans des domaines comme l’audiovisuelle,
les maquettes virtuelles ou les mondes virtuels temps
réels. L’image est dans la plupart des cas animée et cela
si possible en obtenant une grande interactivité utilisateur
–programme. Dans ce cours, nous reprenons dans un premier temps le processus de construction d’images fixes ou animées à partir de scènes comportant des objets 3D. Nous montrerons ensuite à l’aide de deux exemples les compromis nécessaire entre obtention d’un résultat temps réel et images réalistes (proches du monde réel). |
Jeudi 15
mai 14h00 : Mise en correspondance des images d’une séquence
vidéo avec un modèle : Jean
Sequeira - LSIS, Marseille - Jean.Sequeira@univmed.fr
  Reconstitution d’un modèle 3D à partir d’une image vidéo et visualisation depuis un autre point de vue |
Cette présentation
traitera de la mise en correspondance d’images avec un modèle
dans le cas où la scène associée dispose de
certaines caractéristiques bien spécifiques. Dans
l’application que nous aborderons par la suite, la scène – ou
tout au moins la partie qui nous intéresse – s’organise à
partir d’un espace 2D, ce qui nous amènera à chercher une
correspondance 2D-2D. Les images ci-dessous illustrent cette
application : nous disposons de séquences vidéo de
matches de football et nous cherchons reconstituer un modèle 3D
qui représente ces séquences (il s’agira en fait d’un
modèle 2D dans lequel seront disposés des
éléments 3D) – ici nous en resterons à une
reconstitution statique à partir d’une seule image. Deux questions fondamentales se posent pour résoudre ce problème :
La détection d’amers (dans la « Région d’Intérêt ») s’appuiera, pour la caractérisation de droites et d’ellipses, sur des algorithmes originaux relatifs à la Transformation de Hough, et que nous décrirons ici en détail. Enfin, nous montrerons comment il est alors possible de mettre en correspondance l’image et le modèle, et nous illustrerons notre propos par l’application associée au projet Simulfoot. Ci-dessous : exemple de détection d’amers  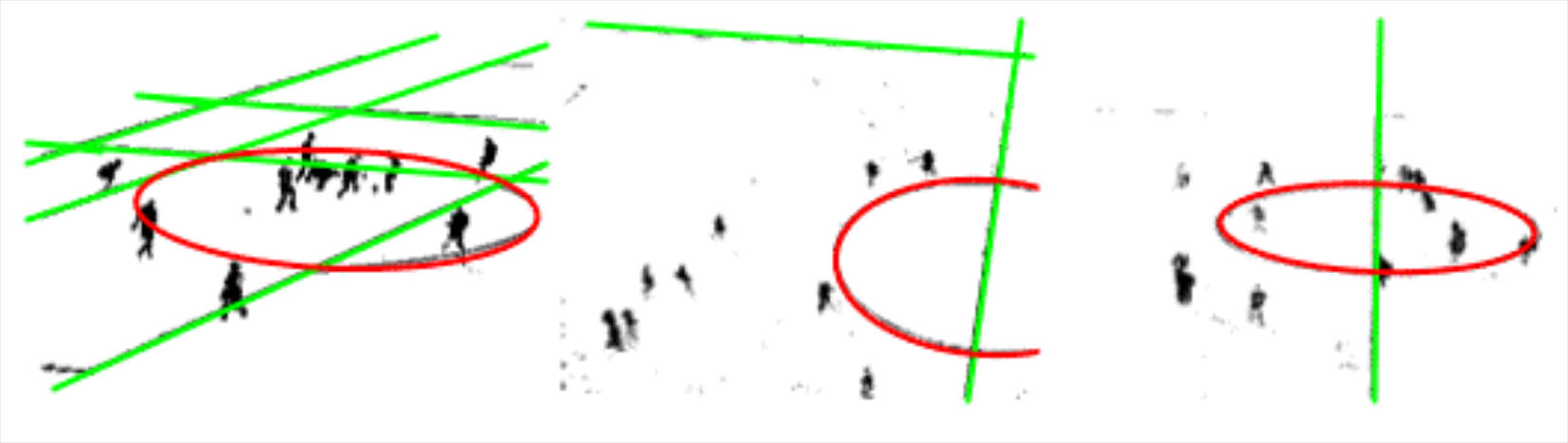 |
 |
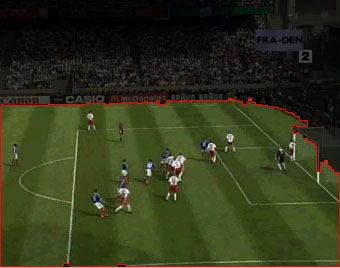 |
| Détection
de la région d’intérêt |
|
Jeudi 29mai 14h00 : Introduction
à la biométrie & reconnaissance de visage
: Jean-Luc
Dugelay - Institut EURECOM, Sophia Antipolis - Jean-Luc.Dugelay@eurecom.fr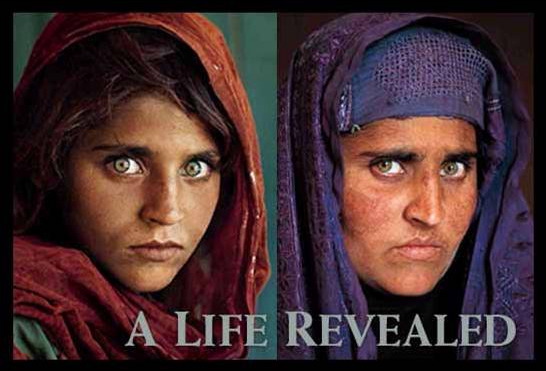 |
La sécurité
utilise 3 types d?authentification : quelque chose que vous connaissez,
quelque chose que vous possédez ou quelque chose que vous
êtes - une biométrie. Parmi les biométries physiques, on trouve les empreintes digitales, la géométrie de la main, la rétine, l'iris ou le visage. Parmi les biométries comportementales, on trouve la signature et la voix. Chaque biométrie inclut des avantages et inconvénients, en termes de performances, coûts, acceptation de la part des utilisateurs, etc. Les systèmes actuels s'orientent donc vers des solutions multimodales. Dans un futur proche, la biométrie devrait jouer un rôle essentiel en sécurité, pour le commerce électronique, mais aussi la personnalisation. Dans ce exposé, il sera plus particulièrement étudié les techniques d'identification et vérification des personnes à partir de signaux image et vidéo (acquisition, traitements et algorithmes, performances, etc.); et en particulier à partir du visage. |
| Vous pouvez aussi
récupérer deux rapports sur la biométrie et les
activités en biométrie de l'Institut EURECOM (cliquez sur
un des yeux) |
  |