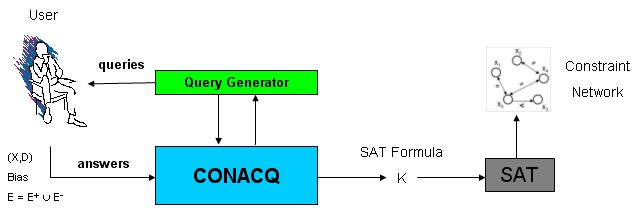
CONACQ is a SAT-based version space algorithm that is capable of learning a constraint network from a set of examples and a library of constraints.
The CONACQ platform is the result of a collaboration between LIRMM and the Cork Constraint Computation Centre.
Constraint programming is rapidly becoming the technology of choice for modelling and solving complex combinatorial problems. However, users of this technology need significant expertise in order to model their problems appropriately. The lack of availability of such expertise is a significant bottleneck to the broader uptake of constraint technology in the real world.
In order to tackle this problem, CONACQ (for CONstraint ACQuisition) has been developped. CONACQ is a SAT-based version space algorithm that is capable of learning a constraint network from a set of examples and a library of constraints. Two versions of CONACQ are currently available : a standard version and an interactive version, which are described bellow.
A technical paper about the standard version of CONACQ is available here.

A technical paper about the interactive version of CONACQ is available here.
Technical papers
C. Bessiere, R. Coletta, B. O'Sullivan, M. Paulin, Query-driven Constraint Acquisition, Proceedings IJCAI'07, Hyderabad, India, pages 44--49, January 2007. Pdf
C. Bessiere, R. Coletta, F. Koriche, B. O'Sullivan, Acquiring Constraint Networks using a SAT-based Version Space Algorithm, Proceedings of AAAI'06, Nectar paper, Boston Massachusetts, July 2006. Pdf
C. Bessiere, R. Coletta, F. Koriche, B. O'Sullivan, A SAT-Based Version Space Algorithm for Acquiring Constraint Satisfaction Problems, Proceedings of ECML'05, Porto, Portugal, pages 747--751, October 2005. Pdf
C. Bessiere, R. Coletta, E.C. Freuder, B. O'Sullivan, Leveraging the Learning Power of Examples in Automated Constraint Acquisition, Proceedings of CP'04, Toronto, Canada, pages 123--137, September 2004. Postscript
R. Coletta, C. Bessiere, B. O'Sullivan, E.C. Freuder, S. O'Connell, J. Quinqueton, Semi-Automatic Modeling by Constraint Acquisition, Proceedings of CP-2003, Kinsale, Cork, Ireland, September 2003. Postscript
R. Coletta, C. Bessière, J. Quinqueton, Modélisation Semi-Automatique par Acquisition de Contraintes, Actes JNPC'03, Amiens, France, Juin 2003. Postscript (in French)
R. Coletta, C. Bessière, J. Quinqueton, Apprentissage de Contraintes, Actes RJCIA'03, Laval, France, Juillet 2003. Postscript (in French)
R. Coletta, C. Bessiere, B. O'Sullivan, E.C. Freuder, S. O'Connell, J. Quinqueton, Constraint Acquisition as Semi-Automatic Modeling, Proceedings of AI-2003, Cambridge, UK, pages 111--124, December 2003.
Practical applications of CONACQ
M. Paulin, C. Bessiere, J. Sallantin, Automatic Design of Robot Behaviors Through Constraint Network Acquisition, To appear in Proceedings of ICTAI'08, Dayton, USA, November 2008. Pdf
M. Paulin, Supervision of robot tasks planning through constraint networks acquisition, Proceedings of CP 2006 Doctoral Programme, pages 180--185, Nantes, France, September 2006. Pdf
In this application, the CONACQ platform is used to automatically encode the elementary actions of a robot as CSPs. (More)