Research Interests
My current research interests mainly focus on surgical robotics, haptics and its associated control issues, including:
- Medical/Surgical robotics
- Teleoperation & Haptics
- Human-machine interaction
- Nonlinear control theory and applications
Research Projects
Exploring muscle state information from surface EMG signals to improve surgical training and skill assessment
Nov. 2018 - Nov. 2020 (Funded by NUMEV LabEx)
This project aims to improve the efficiency and usability of current surgical training and skill assessment methods by integrating the operator’s muscle/joint state as a new performance matrix. Novel method(s) will be developed to calculate/estimate such state information from measured surface electromyographic (sEMG) signals. Validation tests will be conducted to compare the new augmented training and assessment method with traditional solely kinematic motion and force based methods in collaboration with the clinical partners.
TS2RT (Towards Safer and Smarter Robotic-assisted Telesurgery)
Jan. 2018 - Dec. 2020 (Funded by CNRS)
In collaboration with South China University of Science & Technology
Despite the significant developments of robotic-assisted telesurgery, there are still major issues to be further investigated. In this project, we aim to address two main challenges in robotic-assisted telesurgery through our joint research: safer (stable and transparent) interaction between surgeon and surgical robot; smarter task execution through learning. The first challenge represents a threat to safety and reliability of current RAS platforms, and the second challenge stands as a stone in the way to boost the potentials of future surgical robots by transferring human operators’ knowledge and skills. It is expected that the results obtained through this project will push forward the state of the art in robotic-assisted telesurgery and initiate the collaboration of both partners on latest topics at the frontier of surgical robotics area.
ROBACUS (ROBot léger pour l’insertion d’Aiguille téléopérée avec Compensation de moUvements physiologiqueS)
Mar. 2012 - Feb. 2015 (Funded by ANR)
Partners: TIMC-IMAG, CHU/CIC-IT, AXE SYSTEMS
USCOMP (Compensation temps réel du mouvement physiologique sous imagerie ultrasonore)
Dec. 2008 - May 2012 (Funded by ANR)
Partners: INRIA Rennes, LSIIT
HaTUMoCo (Haptic Teleoperation with Uncertainty and Motion Compensation)
Feb. 2010 - Feb. 2012 (Funded by CNRS)
In the scenario of surgical robotics, there has been no agreed solution which proved to be able to achieve stable and transparent transmission of force/torque information between master surgeon and slave robot. This proposed project rises to this challenge and aims at developing a haptic teleoperation scheme which will maximize the transparency of telesurgery and ensure the whole system stability, even with the existence of measurement disturbances and working environment uncertainties. As a major source of disturbances, physiological tissue motion (due to respiration, heart beating or patient movement) compensation will be integrated in the teleoperation system which has never been done in literature of robot-assisted telesurgery. This project will be carried out with close collaboration with clinical surgeon, and the developed results will be assessed through both in vitro and in vivo (animal) tests.
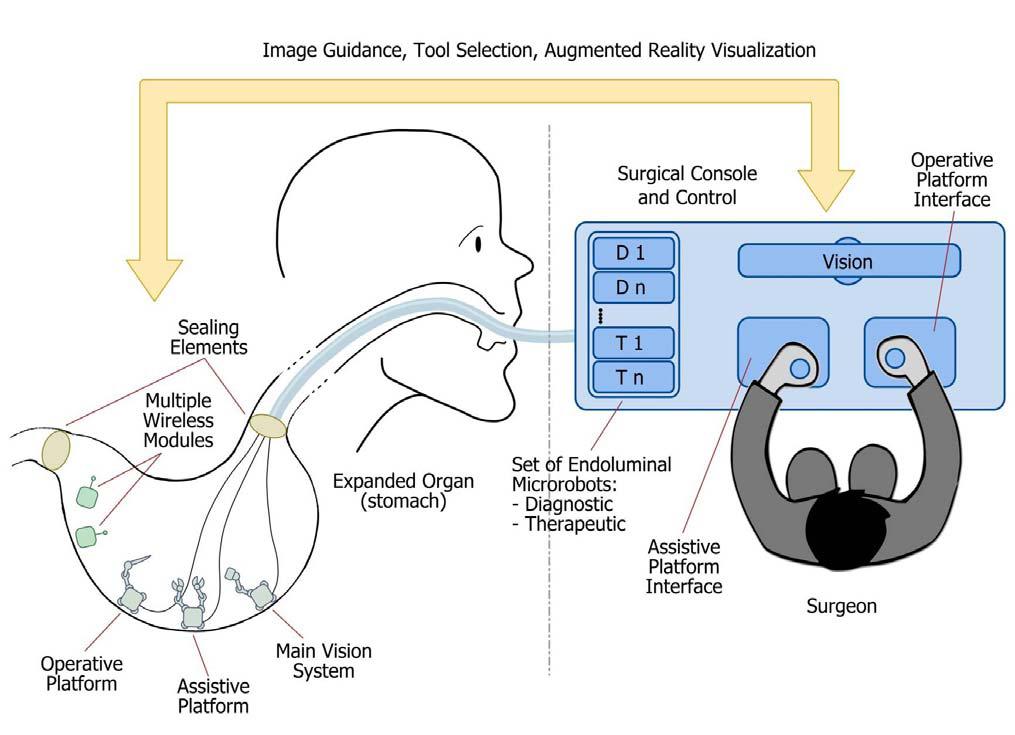
ARAKNES (Array of Robots Augmenting the KiNematics of Endoluminal Surgery)
May 2008 - May 2012 (Funded by EU Commission)
Partners: Scuola Superiore Sant’Anna (SSSA); Imperial College London; Università di Pisa; Ecole Polytechnique Fédérale de Lausanne (EPFL); MicroTech S.r.l. (MT); KARL STORZ GmbH & Co. KG (KST); ST Microelectronics; University of St. Andrews; University of Barcelona; Novineon Healthcare Technology Partners GmbH
ARAKNES is focused on innovative robotic system for endoluminal surgery. The project aims at bringing inside the patient’s stomach a set of advanced bio-robotic and microsystem technologies for therapy and surgery. The ultimate goal of ARAKNES is to integrate the advantages of traditional open surgery, laparoscopic surgery (MIS), and robotics surgery into a novel operative system for bi-manual, ambulatory, tethered, visible scarless surgery, based on an array of smart microrobotic instrumentation. According to these, the precise objective of the project is to bring the ARAKNES system close to real industrial manufacturing and full product validation, so as to make it available soon to surgeons for clinical use.

AccuRobAs (Accurate Robot Assistant)
Oct. 2006 - Oct. 2009 (Funded by EU Commission)
Partners: University of Karlsruhe, University of Verona, German Aerospace Centre, University of Paris IV, BrainLAB
This project responds to the growing demand of advanced tool for surgery, to compensate the sources of uncertainty and achieve higher precision, more dexterity and better perception during surgery. This solution addresses the problem of providing accurate motion and perception to the surgeon, by using KineMedic, a new compliant robotic arm developed by DLR. A surgeon can move the robot by hand, teleoperate it, or let it execute an automatic task. AccuRobAs entails the development of a distributed, modular surgical environment, which extends the capabilities of the robotic arm by providing software tools to model, plan and execute a surgical procedure. The overall system will be open to contributions by the user community as well as potential developer, with whom a discussion forum will be established. System capabilities will be benchmarked in two demonstrators:
• Laser ablation system, for autonomous task execution
• Haptic palpation, to demonstrate tissue perception during laparoscopic surgery