
Le module image vous est proposé par le projet ICAR (image et interaction)

| .......
Module Image ....... Le module image vous est proposé par le projet ICAR (image et interaction) |
|
 Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |


 : Pour vous connecter sur la
page institutionnelle de l'intervenant
: Pour vous connecter sur la
page institutionnelle de l'intervenant  : Pour récupérer une
présentations (lorqu'elles nous a été transmise)
: Pour récupérer une
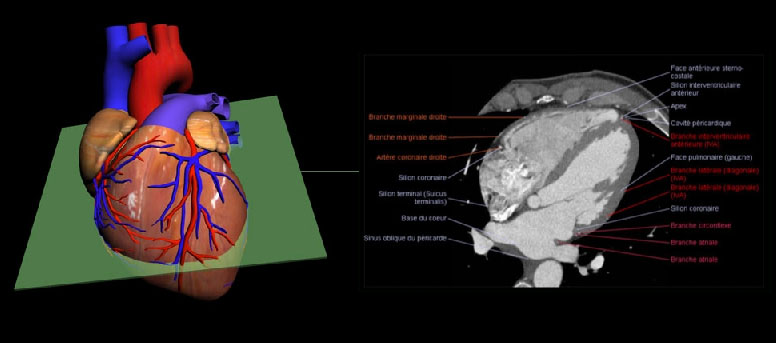
présentations (lorqu'elles nous a été transmise)  Jeudi 1er avril 14h00 : Imagerie médicale : de l'acquisition à l'évaluation. Denis Hoa - IMAIOS SAS - denis.hoa@imaios.com
Jeudi 1er avril 14h00 : Imagerie médicale : de l'acquisition à l'évaluation. Denis Hoa - IMAIOS SAS - denis.hoa@imaios.com| Plan du cours : 1 - Acquisition des images médicales 1.1 - Les différentes modalités d'imagerie médicale : TDM, IRM, US, CR, TEP, MN Principes physiques d'acquisition et exemples 1.2 - Le format DICOM et le stockage/transmission des images médicales (PACS) 2 - Critères d'évaluation d'une procédure diagnostique. 2.1 Bases de biostatistiques en imagerie médicale 2.2 Courbes ROC 3 - Traitement des images médicales Reconstruction, 3D, Segmentation, CAD... |
 |
|
Image médicale 3D et coupe tomographique |
Jeudi 15 avril 14h00
: Extraction de points d'intérêt et image couleur. Philippe Montesinos - LGI2P, EMA, Nîmes - philippe.montesinos@ema.fr Jeudi 20 mai 9h00
: Images tridimensionnelle. Gérard Subsol - ICAR, LIRMM, Montpellier - subsol@lirmm.fr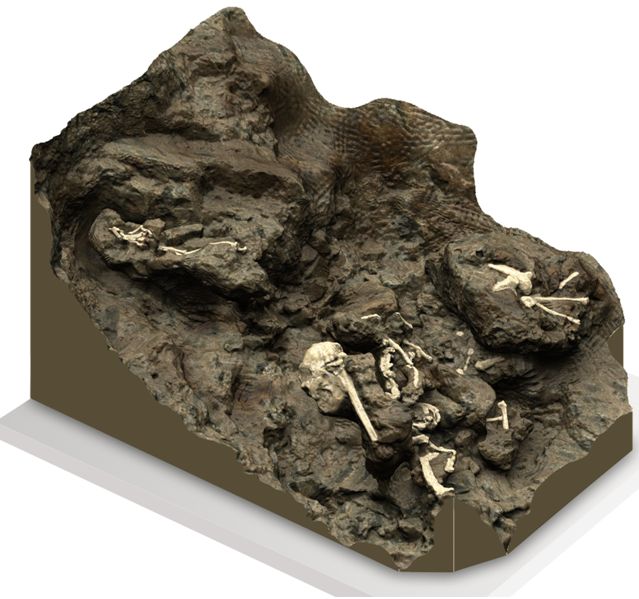 Numérisation 3D par balayage laser d'un site de fouilles préhistoriques (Australopithecus Africanus, -2,5 millions d'années) |
Les
système de numérisation 3D qu'ils soient surfacique (par exemple, par balayage laser) ou volumique (par exemple, tomodensitométrie X) sont de plus en plus utilisés dans le domaine de l'archéologie et de la paléontologie. Dans cet exposé, nous présenterons les problèmes informatiques en traitement et modélisation qui se posent quand on manipulent ces données 3D comme la segmentation, le recalage, la modélisation géométrique, la visualisation ou l'interaction. Nous effectuerons aussi des démonstrations à partir de logiciels du domaine public. cliquez sur le lien >>>> |
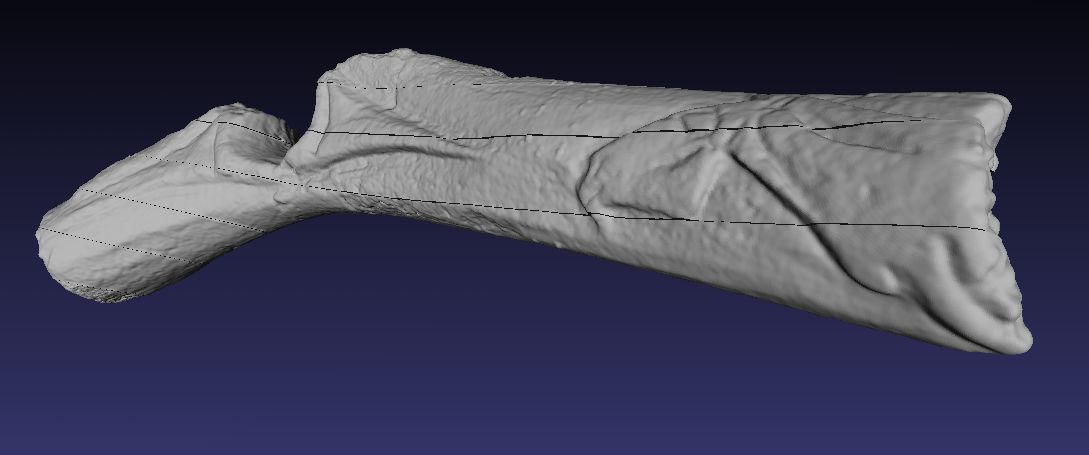 Numérisation 3D par micro-scanner X d'un objetd'art préhistorique (-12 000 ans) |
Jeudi 20 mai 14h00
: Vision omnidirectionnelle. Cédric Demonceaux - MIS, Amiens - cedric.demonceaux@u-picardie.fr| Dans
de nombreuses applications, une vision à 360° de
l‘environnement à l‘aide d’une seule prise de vue est un avantage
indéniable : localisation en robotique mobile, navigation de robot,
télésurveillance, la reconstruction 3D… Cette vision dite
omnidirectionnelle peut être obtenue à l’aide de différents procédés.
On peut par exemple utiliser plusieurs caméras (Google Street View,
Ladybug), une optique fish-eye ou encore associer un miroir à une
caméra classique (Fig 1.). Malheureusement, celle-ci aboutit à des images avec de fortes distorsions dont il faut tenir compte pour l’exploitation de l’information visuelle. En effet, les droites de la scène observée ne sont plus des droites dans les images, la topologie euclidienne dans le plan image n’a plus de signification physique, la géométrie projective n’est plus respectée… Néanmoins, depuis 2000, un cadre théorique a permis de modéliser ces images comme des images sphériques. C’est dans ce cadre que nous montrerons comment adapter les outils classiques développés pour les caméras perspectives aux caméras omnidirectionnelles. Ainsi, dans cet exposé, nous nous intéresserons aux différents moyens pour obtenir une image omnidirectionnelle. Puis nous verrons que celles-ci peuvent être considérées comme des images sphériques (Fig 2.). Cette modélisation nous permettra alors d’adapter les outils classiques de traitement à ces images particulières (Fig 3.). Enfin, nous donnerons également des exemples d’applications en robotique. |
 Fig. 2 : Image Sphérique |
 Fig 1 : Image Catadioptrique |
 Fig 3 : Détection de faisceaux de droites |
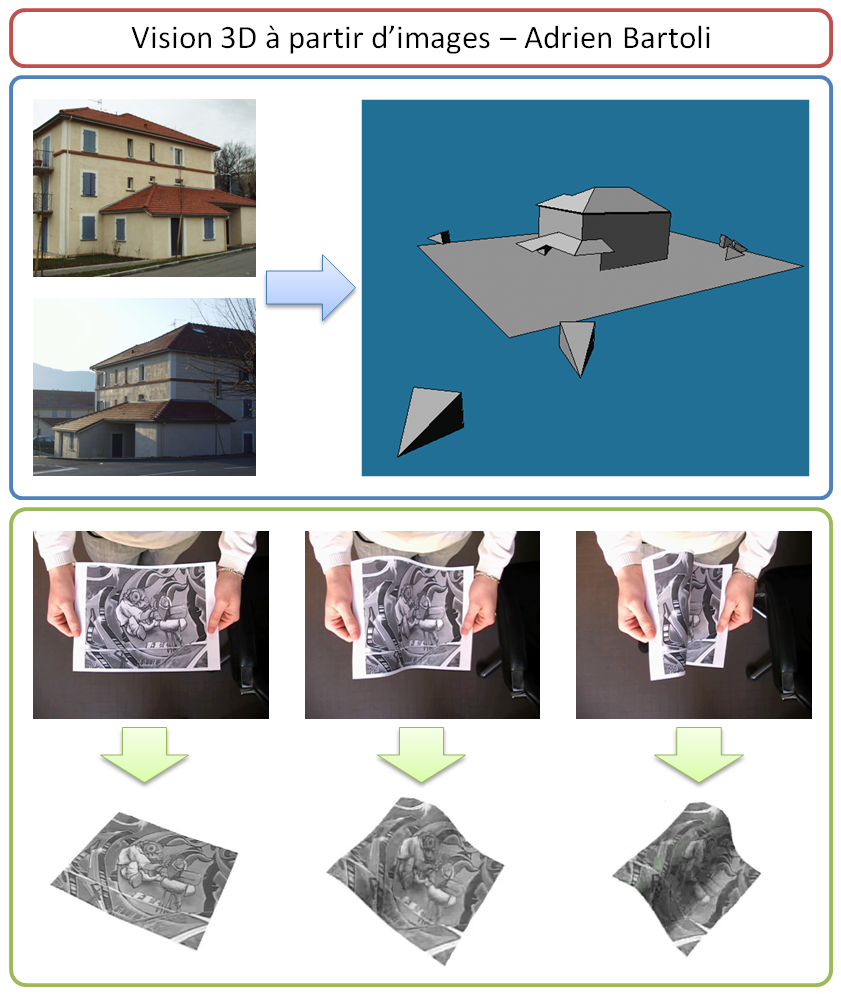
Jeudi 27 mai 14h00
: Vision 3D à partir d'images. Adrien Bartoli - Clermont Université, Clermont-Ferrand - Adrien.Bartoli@gmail.com
| La vision 3D non calibrée à pour but d'inférer de l'information tridimensionnelle à partir d'images. Les applications de ces techniques sont multiples : • reconstruction de modèles numériques de bâtiments, • création de panoramas, incrustation d'objets virtuels sur une vidéo (réalité augmentée), • mesure sans contact (photogrammétrie), etc. Le problème de la vision 3D est difficile car les positions, orientations, et paramètres internes (distance focale, etc.) des caméras doivent être calculés, ainsi que la structure 3D de l'environnement. - La première partie de l'exposé présente les résultats matures obtenus à ce jour dans le domaine dans le cas d’un environnement rigide. L'approche qui s'est imposée comme standard ces dernières années sera présentée en détail et illustrée à l'aide d'un logiciel de reconstruction 3D. - La deuxième partie de l'exposé présente des résultats de recherche récents concernant les environnements déformables constitués d’un seul objet. |
 |
Jeudi 3 juin 14h00
: Applications du traitement des images en Astronomie. Antoine Lleberia - LAM, Marseille - antoine.llebaria@oamp.fr| Le
traitement des images est un auxiliaire indispensable pour la recherche
en astrophysique, ou les images, aux aspects très divers son destinés
à mesurer avec la meilleure précision possible des paramétres
photométriques et géométriques. Depuis des décennies ces exigences ont
été une source permanente de défis pour l’imagerie scientifique,
Dans cet exposé on montrera l’étendue du panorama d’applications tout
en l’illustrant par des exemples précis. L’introduction décrira cette variété de défis née de la diversité des domaines scientifiques, de la variété de fenêtres d’observation (visible, UV, rayons X, infrarouge…) et des nombreux types d’imageurs et de contextes d’acquisition. Ceci sera suivi de quelques exemples typiques  Étalonnage en vol d’un coronographe spatial Restitution d’un fond d’image d’un champ profond a très faible flux Photométrie UV (ultraviolette) de galaxies lointaines moyennant des images visibles à haute résolution Restitution 3D d’objets du système solaire de faible taille à partir des images de survol Séparation du limbe et du terminateur sur des images des objets irréguliers du système solaire Analyse des plumes solaires Étalonnage en vol d’un coronographe spatial Restitution d’un fond d’image d’un champ profond a très faible flux Photométrie UV (ultraviolette) de galaxies lointaines moyennant des images visibles à haute résolution Restitution 3D d’objets du système solaire de faible taille à partir des images de survol Séparation du limbe et du terminateur sur des images des objets irréguliers du système solaire Analyse des plumes solairesDes techniques multiresolution, de "forward modelling" et d'analyse statistique d’image seront détaillés à cette occasion. L’exposé conclura par une perspective sur les enjeux et les techniques en cours de dévéloppement. |
 Image de la galaxie d’Andromède en proche Ultraviolet, résultat de la composition de 8 champs obtenus par l’expérience Galex en 2007. Crédit consortium Galex |