
Le module image vous est proposé par le projet ICAR (image et interaction)




| .......
Module Image .......
Le module image vous est proposé par le projet ICAR (image et interaction) |
|
|
|
 Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. Marc Chaumont,
LIRMM,
département informatique.
04 67 41 85 14.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. Marc Chaumont,
LIRMM,
département informatique.
04 67 41 85 14.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |



 : Pour vous connecter sur la
page institutionnelle de l'intervenant
: Pour vous connecter sur la
page institutionnelle de l'intervenant  : Pour
récupérer une
présentation (lorqu'elle nous a été transmise)
: Pour
récupérer une
présentation (lorqu'elle nous a été transmise)  Mercredi 28 mars - 9h00-12h00 : Modèles thermiques, cinématiques et mécaniques pour l'interprétation des images. Bertrand Wattrisse et André Chrysochoos : Laboratoire de Mécanique et Génie Civil - Montpellier
Mercredi 28 mars - 9h00-12h00 : Modèles thermiques, cinématiques et mécaniques pour l'interprétation des images. Bertrand Wattrisse et André Chrysochoos : Laboratoire de Mécanique et Génie Civil - Montpellier| La
mécanique expérimentale a été profondément transformée ces 20 dernières
années par le développement de l’instrumentation et en particulier par
celui de l’imagerie et du numérique. En effet, dans ce domaine, et
d’une manière plus générale pour l’ensemble des sciences présentant un
caractère expérimental, les outils d’imagerie, du fait de la richesse
d’information auxquels ils donnent accès, se sont rapidement imposés
comme des moyens incontournables pour étudier la réponse de systèmes
des plus simples aux plus complexes. Le cours s’organisera en deux parties. |
 Dispositif d’imagerie thermomécanique pour l’étude du comportement des matériaux |
| Dans une première partie on présentera dans un premier temps quelques modèles d’interprétation permettant d’extraire, à différentes échelles, des quantités physiques de complexité croissante. On commencera par décrire quelques moyens d’interprétation des données brutes acquises par l’imageur (analyses statistiques, application de transformées mathématiques, …) puis on introduira progressivement des modèles intégrant des concepts physiques plus évolués : conservation du flot optique, description d’un comportement (cinématique : forme des déplacements, thermique : échanges de chaleur, et mécanique : loi de comportement, …). |  |
Distribution 1D de dissipation lors d’un essai en fatigue dans un cuivre. Corrélation microstructure - propriétés macroscopiques |
| La
seconde partie présentera quelques exemples récents d’application de
ces méthodes d’imagerie quantitative à la compréhension de
mécanismes
thermomécaniques couplés dans le domaine de la Science des Matériaux.
On insistera en particulier sur l’intérêt d’utiliser l’imagerie pour mieux distinguer : - les origines des effets du temps sur le comportement des matériaux - la nature des boucles d’hystérésis mécaniques - les origines des effets dissipatifs |
Mercredi 28 mars - 14h00-17h00 : From monocular deformable model
alignment and 3D reconstruction to computer-aided laparoscopy. Adrien Bartoli : Institut Pascal (UMR6602), CNRS, UCA et CHU de Clermont-Ferrand.| The first part of my lecture addresses the problem of reconstructing the 3D shape of a deformable environment from monocular images. Given image correspondences capturing the visual motion, the problem can be modeled by a nonlinear PDE system. We will first see that if the 3D shape is known for one image a priori, it can be reconstructed for another image by solving the PDE locally, meaning at each point correspondence independently. This surprizing result rests on the widely applicable assumption that the scene deformation is isometric, which means that it preserves geodesic distances. We will then see that this result extends to the general case: given multiple monocular images, one can solve a PDE locally to find the observed 3D shape for each image. |
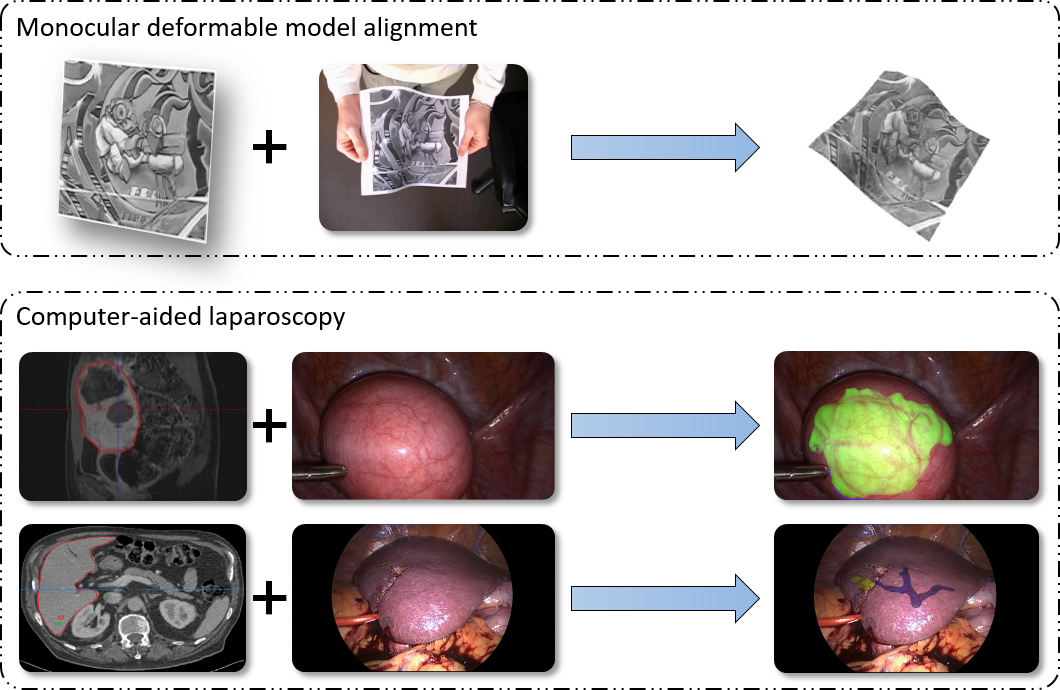 |
The second part of my lecture focuses on an application of the theory of deformable model alignment and 3D reconstruction: the development of systems to aid laparoscopy by augmented reality based on preoperative data. A major current limit of laparoscopy is that the surgeon can neither see through the organs nor can they palpate them. Therefore, finding internal structures such as tumors might be extremely difficult. We showed that in some cases, the preoperative MRI or CT scan can be used to augment the laparoscopy video, creating some sort of virtual transparency. The general case is however an extremely tough problem for many reasons, with the need for novel theoretical and practical computer vision results. |
Jeudi
29 mars - 9h00-12h00 : L’imagerie radar : Technique, exemples
d’applications, et zoom sur la cartographie de l’humidité des sols par
imagerie radar. Nicolas Baghdadi : TETIS - Territoires, Environnement, Télédétection et Information Spatiale - Montpellier. | L’observation par télédétection associée à la mesure et à la modélisation est une discipline qui permet d’appréhender les propriétés fonctionnelles du système observé et leur dépendance à ses propriétés structurales. C’est une des disciplines-clés qui permettent l’analyse et donnent accès à la compréhension du fonctionnement de notre environnement : son quotidien se consacre à l’analyse du changement climatique, aux conséquences des pressions anthropiques et démographiques, aux catastrophes naturelles, à la baisse croissante des ressources (eau, alimentation, etc.), à la dégradation de la biodiversité dans tous les milieux, à la désertification, à la nécessité de nourrir la planète (cartographie des cultures, prédiction des rendements, par exemple), etc. |
 Carte d’humidité sur un site d’étude en Occitanie |
 Carte de la biomasse forestière sur la Guyane Française |
Analyser et comprendre ces différents problèmes passe : – par l’analyse des objets détectés, structuraux et fonctionnels (sols, hydrosystèmes, végétation, etc.) – par la compréhension des processus élémentaires majeurs qui relient ces éléments majeurs : écoulements de l’eau à toutes les échelles et dans tous les compartiments, érosion, météorologie, développement des cultures, pollution des sols, etc. ; - par le développement d’indicateurs pour évaluer l’évolution à court, moyen et long terme de tous les compartiments et variables de l’environnement. |
| Cette présentation est structurée en 3 parties : 1. Rappel sur la technique radar 2. Exemples d’applications en surfaces continentales 3. Etat de la recherche sur la cartographie de l'humidité des sols en milieux agricoles |
Jeudi 29 mars - 14h00-17h00
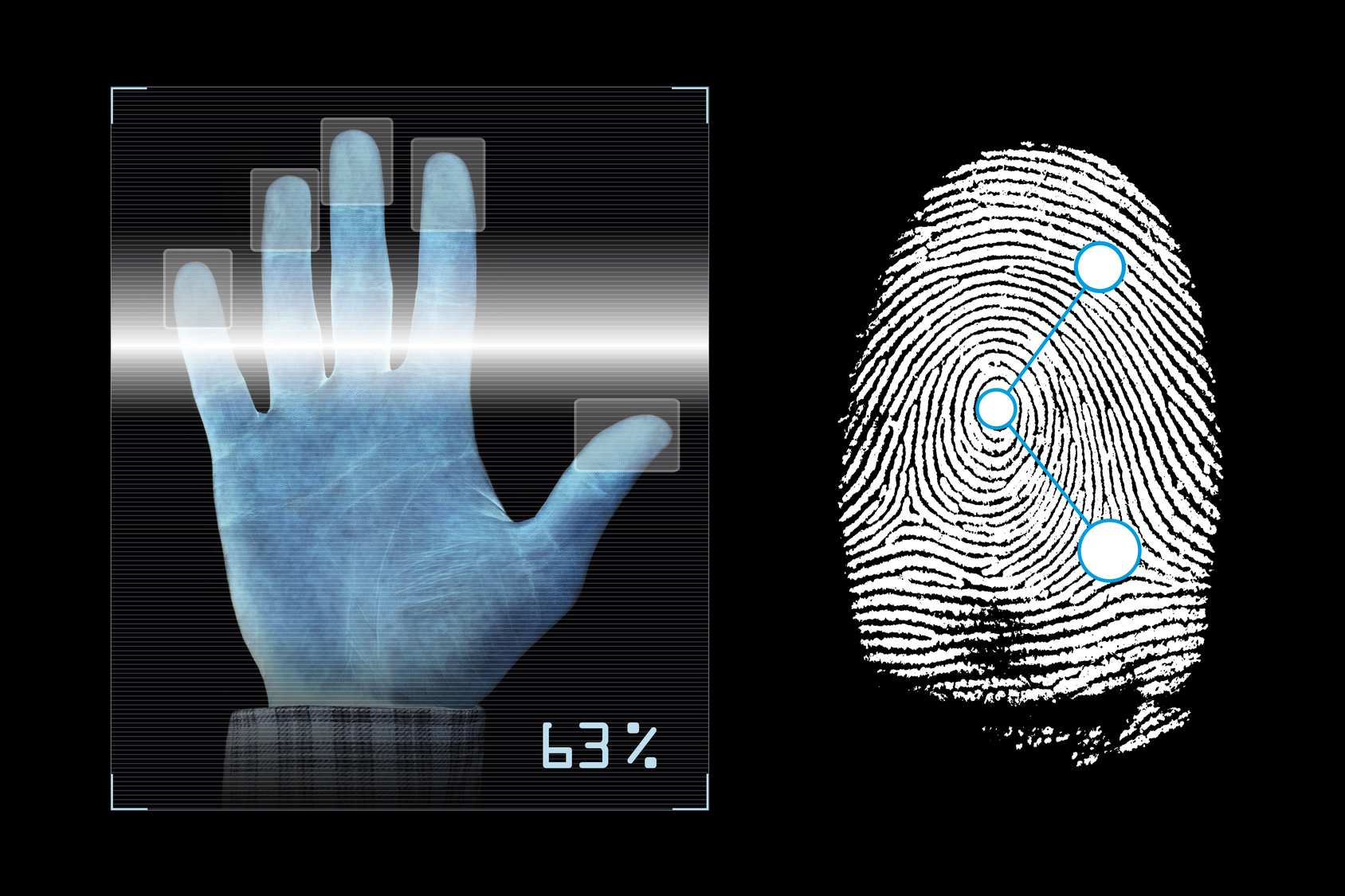
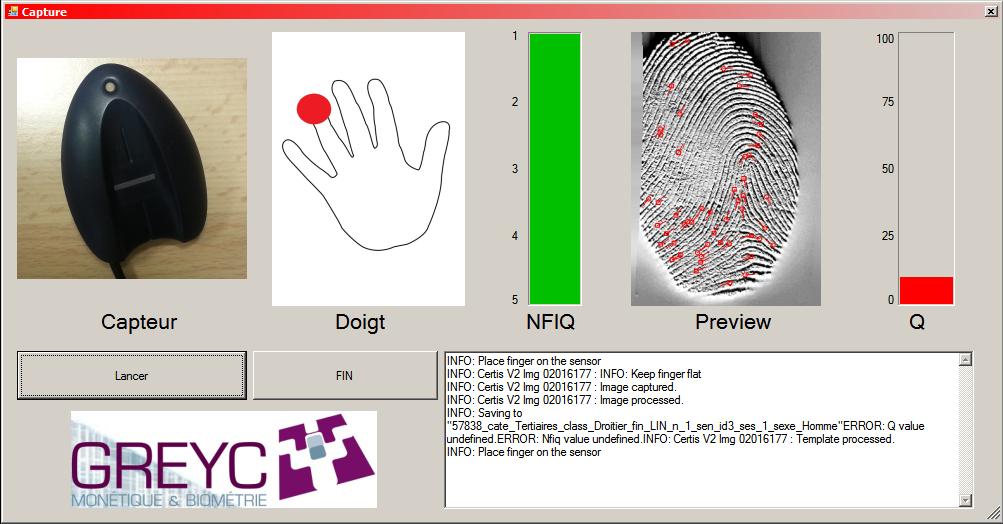
: Comment les machines nous reconnaissent ? le cas de l'empreinte digitale Christophe Rosenberger
: ENSICAEN - GREYC - Caen. | La
biométrie concerne l'identification et la vérification d'identité
d'humains par des machines à partir de caractéristiques
comportementales ou morphologiques. Cette technologie est de plus en
plus utilisée dans notre quotidien (reconnaissance faciale sur mobile,
reconnaissance d'empreinte digitale sur ordinateur...) mais pose
plusieurs questions techniques et éthiques : comment évaluer ce type de
système ? comment protéger ces données personnelles sensibles ?
L'empreinte digitale est la modalité biométrique largement utilisée et
servira d'exemple sur ce cours. Des illustrations de travaux récents du
GREYC sur l'empreinte digitale seront présentées à cette occasion. |
 |
 |
Vendredi 30 mars - 9h00-12h00 : Capture et analyse des formes en mouvement. Edmond Boyer : MORPHEO LJK / INRIA - Grenoble Rhône-Alpes.| Les
techniques modernes d’acquisition multi-caméras permettent de
construire des modèles 4D de formes en mouvement, appelés aussi
hologrammes. Ces modèles apparaissent notamment dans les films, les
jeux et les applications de réalité virtuelle et augmentée. Que
sont-ils exactement ? Comment sont-ils obtenus et à quoi servent-ils ?
|
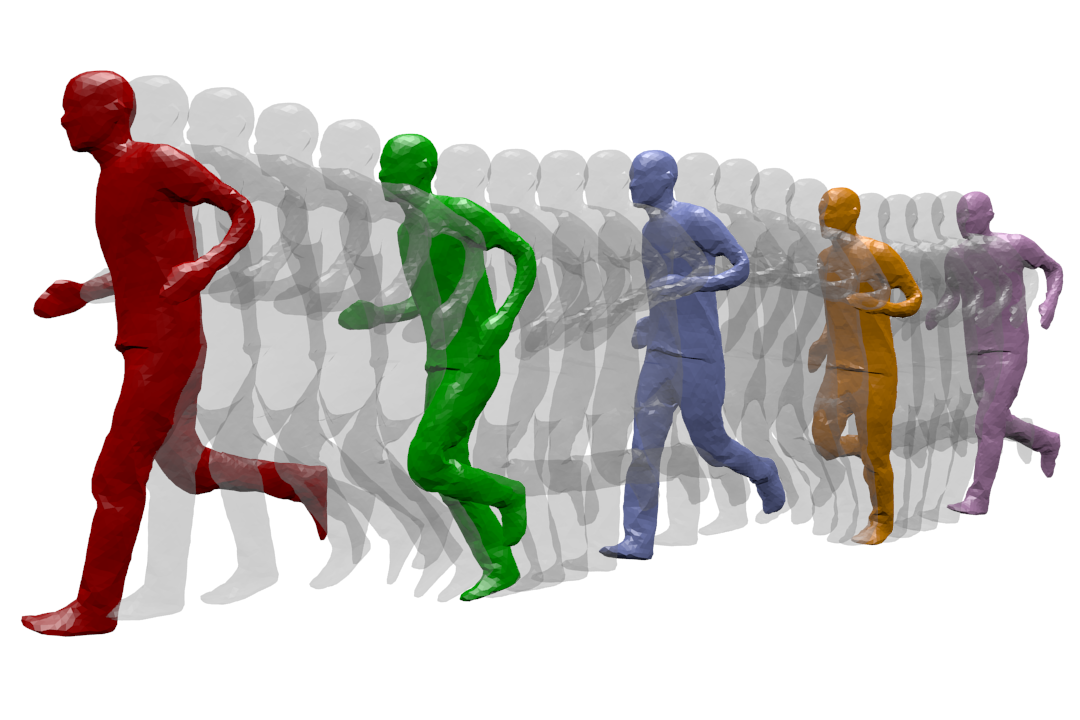
| •
La première partie de l’exposé portera sur l’évolution des méthodes de
reconstruction 3D en vision par ordinateur vers la modélisation 4D
ainsi que sur les usages des modèles produits. • La deuxième partie s’intéressera aux enjeux scientifiques et techniques dans ce domaine. |
Vendredi 30 mars - 14h00-17h00 : Numérisation 3D : la tête dans les nuages (de points). Franck Hétroy-Wheeler: MOSAIC (Lyon) / ICUBE (Strasbourg).| La numérisation 3D consiste à créer un modèle géométrique virtuel d'un objet réel. Elle est devenue standard dans de nombreux domaines (industriel, culturel, architectural, médical, ...), car elle permet des choses difficiles ou impossibles à faire sur un modèle réel, comme le manipuler sans l'abîmer, repérer des détails imperceptibles à l'oeil nu, effectuer des mesures très précises à des échelles très grandes, dupliquer ou modifier l'objet tout en conservant l'original, etc. Prenons le cas d'un arbre : les biologistes étudiant l'impact de l'environnement sur la croissance de celui-ci, tout comme les gestionnaires des forêts, ont besoin de faire des mesures régulières et répétées (diamètre à hauteur de poitrine, aire des feuilles, angles des branches, ...). Une mesure manuelle est extrêmement fastidieuse et peu précise, voire impossible (aire des feuilles) sans abîmer l'arbre. La numérisation 3D s'avère donc indispensable. | 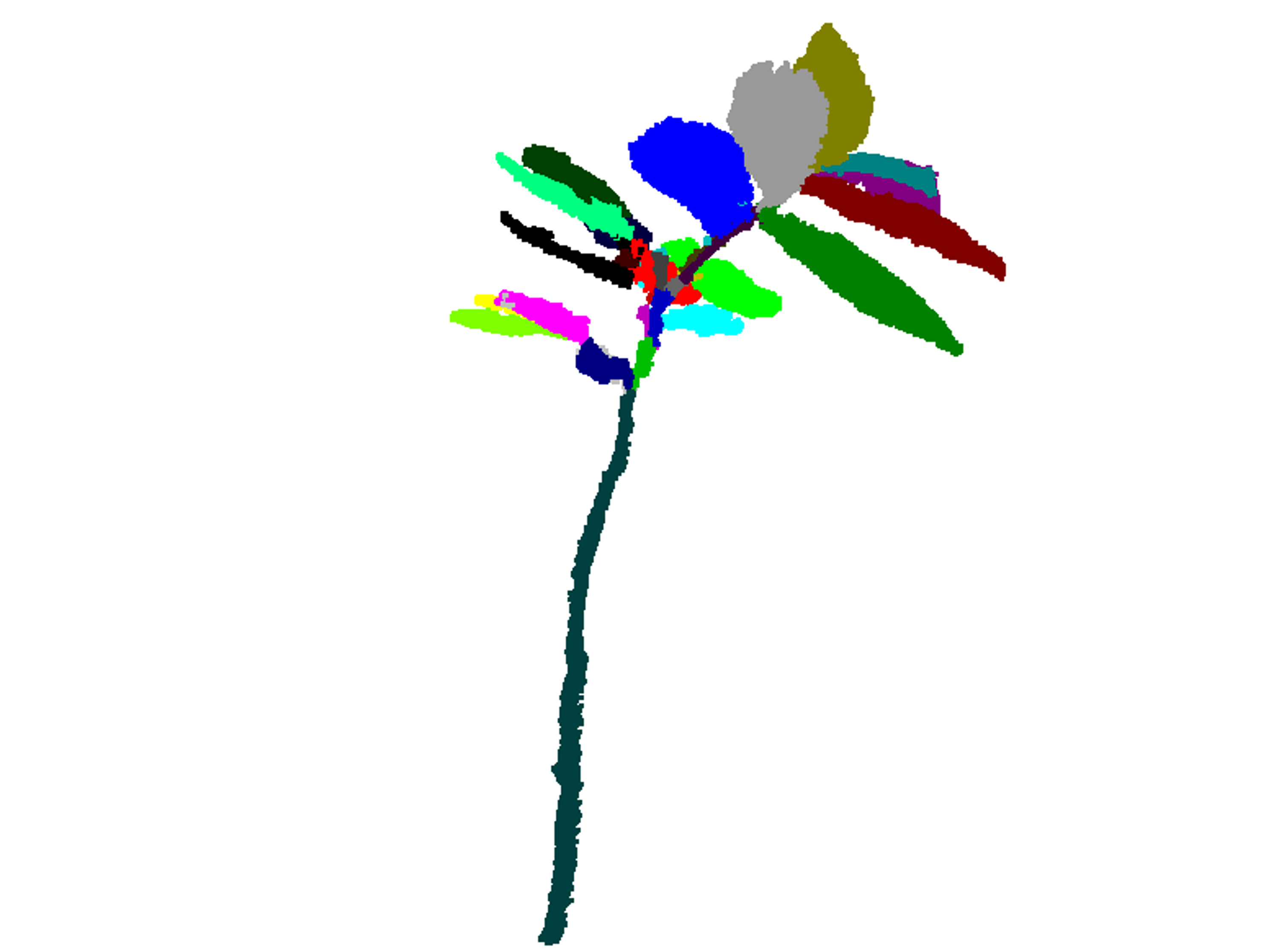
|
| La première étape du processus de numérisation consiste en la création automatique d'une représentation informatique bas-niveau de l'objet numérisé grâce aux capteurs utilisés. Cette représentation prend souvent la forme d'un nuage de points tridimensionnels. Les étapes suivantes ont pour but d'analyser et de comprendre l'objet étudié, de manière la plus automatique possible, à partir de ce nuage de points démuni d'information globale sur l'objet : si je veux calculer l'aire d'une feuille, comment retrouver et regrouper les points appartenant à cette feuille dans le nuage d'un arbre numérisé ? Comment ensuite calculer effectivement et précisément cette aire à partir uniquement de ces points, sachant que le nuage peut être incomplet en raison des occultations entre feuilles lors de la numérisation ? | Dans cet exposé je présenterai un aperçu de techniques mathématiques et algorithmiques existantes pour, à partir d'un nuage de points, retrouver des informations géométriques pertinentes sur l'objet numérisé, améliorer (débruiter/simplifier/décomposer) le nuage de points, et enfin le convertir en maillage, souvent préférable pour des applications avancées. J'illustrerai le propos par des exemples concrets issus de mes travaux (et d'autres) de numérisation d'arbres forestiers. |
