
Le module image vous est proposé par le projet ICAR (image et interaction)

| .......
Module Image ....... Le module image vous est proposé par le projet ICAR (image et interaction) |
|
 Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
Olivier
Strauss, LIRMM,
département robotique. 04 67 41 85 87. William
Puech, LIRMM, département
robotique. 04 67 41 86 85.
|
sur le module image en
envoyant un e-mel (cliquez sur le penseur). |


 : Pour vous connecter sur la
page institutionnelle de l'intervenant
: Pour vous connecter sur la
page institutionnelle de l'intervenant  : Pour récupérer une
présentations (lorqu'elles nous a été transmise)
: Pour récupérer une
présentations (lorqu'elles nous a été transmise)  Mercredi 6 avril - 9h30-12h30 : Filtrage particulaire, applications en vision par ordinateur Désiré Dro Sidibé - Université de Bourgogne - IUT Le Creusot - dro-desire.sidibe@u-bourgogne.fr
Mercredi 6 avril - 9h30-12h30 : Filtrage particulaire, applications en vision par ordinateur Désiré Dro Sidibé - Université de Bourgogne - IUT Le Creusot - dro-desire.sidibe@u-bourgogne.fr| L’estimation
(filtrage, prédiction ou lissage) est une problématique cruciale dans
de très nombreux domaines : traitement du signal, automatique, etc. Dans le domaine de la vision par ordinateur, de nombreuses applications nécessitent la détection et le suivi d’objets en mouvement dans une séquence d’images. Suivre un objet ou une forme consiste, essentiellement, à prédire et estimer sa position dans chacune des images de la séquence. Le problème peut donc être formulé comme celui de l’inférence Bayesienne et les méthodes de type filtre de Kalman ou filtre particulaire offrent des solutions avantageuses. Dans cet exposé, nous essayerons de présenter de la manière la plus compréhensible possible les principes de base du filtrage particulaire au travers des applications en vision par ordinateur. En particulier, nous nous intéresserons au suivi dans des séquences d’images et au problème de la localisation en robotique mobile (SLAM). | 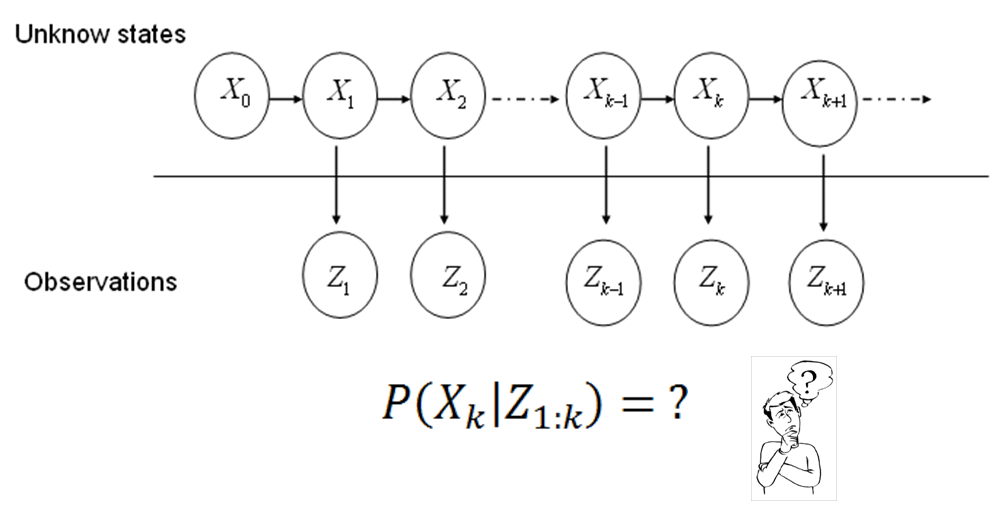 |
Mercredi 6 avril - 14h00-17h00 : Imagerie 3D en biologie évolutive. Renaud Lebrun - ISEM - renaud.lebrun@univ-montp2.fr| Les méthodes d'imagerie 3D sont d’une utilisation croissante en biologie évolutive car elles permettent l'étude des structures internes d'objets biologiques de manière non destructive. - Chez les organismes actuels, on peut ainsi accéder aux structures internes sans dissection et/ou sans sacrifice. - En paléontologie, ces techniques permettent la préparation virtuelle de fossiles dans les cas où l’on ne peut les extraire physiquement de leur enveloppe de sédiments. Il est possible de reconstruire des morphologies originales altérées (écrasement, parties absentes etc.) |
 |
| Au delà de la
visualisation des structures internes, l’intérêt des représentations 3D
de ces objets est qu’elles peuvent être soumises aux analyses de morphométrie ou toutes autres méthodes s’appuyant sur la quantification des formes des objets biologiques (actuels ou anciens), ce afin d'établir des inférences phyloégénétiques et morpho-fonctionnelles pour des organismes actuels ou éteints. |
Jeudi 7 avril - 9h30-12h30 : Suivi 3D pour la réalitee augmenté et la robotique. Eric Marchand - IRISA, Nantes - Eric.Marchand @ irisa.fr| Ce
cours présentera les techniques de localisation de caméra et de
suivi 2D/3D en temps-réel pour la réalité augmentée et pour la
robotique. Nous évoquerons dans un premier temps les approches 3D reposant sur l'utilisation d'un modèle de l'objet considéré. Nous définirons le concept du calcul de pose et les outils nécessaires à la résolution du PnP (Pose from n Points) et nous montrerons que ce problème peut aussi être résolu pour des scènes relativement complexe. Nous évoquerons donc le cas du suivi d'objet rigide en utilisant tout d'abord un modele de projection perspectif et reposant uniquement sur l'analyse des contours dans l'image. Ce cas sera étendu à l'introduction d'une contrainte spatio-temporelle reposant sur l'utilisation des textures. Ces techniques peuvent aussi être étendu au cas de caméras catadioptrique. |
 |
| Dans un deuxième temps, nous aborderont le problème de la localisation comme un problème de suivi 2D et d'estimation d'une transformation planaire entre deux images. Nous aborderons les techniques de suivi dense (type KLT) avant d'étendre ce conceptpour permettre un suivi multimodal. | En parallele, nous tenterons de montrer que les liens entre ces différents problèmes et les techniques de commande en robotique par asservissement visuel sont très étroits. |
Jeudi 7 avril - 14h00-17h00 : Mesures psycho-visuelles en traitement d'images. Patrick Le Callet - IRCCYN/IVC, Nantes - Patrick.Le-Callet @ univ-nantes.fr
| Les images ne cessent d’être plus présentes dans notre environnement. La révolution du tout numérique a induit une explosion des usages et des modes de consommation des contenus visuels. D’énormes efforts en recherche et développement sont consacrés au développement d’applications visant à produire des images exploitées par des humains. Logiquement, le développement de telles applications doit prendre en compte l'utilisateur final notamment en termes de perception visuelle. Ce constat a conduit à l’émergence d’approches psychovisuelles pour le traitement des images et des vidéos. Cette démarche, pluridisciplinaire et pionnière dans la communauté du traitement d’images, consiste à améliorer des techniques de traitement d’images à partir de modèles du système visuel humain. Les modèles de mécanismes du système visuel humain sont obtenus à partir de résultats d’expériences de psychophysiques avec observateurs. Les mécanismes à modéliser sont identifiés à partir des avancées de la recherche en neurobiologie. A partir de 1992, les travaux de recherche ont été développés dans l’équipe IVC au sein du thème «psychovisuel» en utilisant cette méthodologie. |
 |
| L’objet
de ce
module est de présenter quelques résultats de cette aventure en
couvrant à fois les aspects modélisation de mécanismes de perception
(bas et haut niveau) et les applications associées (tatouage, qualité
et
QoE, compression, content repurposing). Un éclairage particulier sera apporté sur les problématiques perceptuelles autour de la TV3D stéréo. Considérée comme une opportunité pour sublimer l’expérience visuelle, la TV3D focalise un grand intérêt pour l’industrie du “broadcasting”. Un des points importants pour assurer le succès d’une telle technologie réside dans sa capacité à offrir une qualité d’expérience suffisante. La mesure de qualité, qu’elle soit subjective ou objective, dans un contexte 3DTV soulève plusieurs questions et de nouveaux défis comparés à l’évaluation de qualité vidéo et ce sur toute la chaine de diffusion, de la production de contenu jusqu’à son rendu sur écrans 3D. Ces différentes questions seront présentées ainsi qu’un état des réponses actuelles. |
Vendredi 8 avril - 9h30-12h30 : Traitement et analyse d'images médicales: application à l'évaluation pronostique des insuffisances cardiaques. Denis Mariano-Goulard - CHU Lapeyronie, Montpellier - d-mariano_goulart @ chu-montpellier.fr| Ce cours vise à illustrer le rôle qu'un spécialiste en traitement et analyse d'images peut jouer au sein de services hospitaliers ou de sociétés commerciales liées à l'imagerie médicale. Nous partirons d'un problème clinique spécifique qui se pose aux cardiologues (évaluation pronostique des insuffisances cardiaques) pour envisager le choix d'une modalité d'imagerie médicale et d'un protocole d'acquisition d'images. Nous évoquerons ensuite comment le signal peut être déconvolué de la réponse impulsionnelle de l'appareil d'imagerie, puis bénéficier d'une reconstruction tomographique. Les problématiques liées à la segmentation des données d'imagerie puis à leur analyse sera enfin présentée en concluant sur les paramètres cliniques extraits et utilisés en routine hospitalière. Les solutions logicielles qui seront présentées au fil de l'exposé ont toutes été mises au point dans les vingt dernières années et constituent donc une image assez représentative de l'apport des méthodes de traitement du signal à l'amélioration de la prise en charge médicale de certaines pathologies. |  |
Vendredi 8 avril - 14h00-17h00 : Modélisation 3D. Gilles Gesquière - LSIS, Marseille - gilles.gesquiere@up.univ-mrs.fr| L’image
virtuelle est présente autour de nous dans des domaines comme
l’audiovisuelle, les maquettes virtuelles ou les mondes virtuels temps
réels. L’image est dans la plupart des cas animée et cela si possible
en obtenant une grande interactivité utilisateur –programme. Derrière
ces représentations se cachent des modèles géométriques. Dans cet exposé, nous reprendrons dans un premier temps le processus de construction d’images fixes ou animées à partir de scènes comportant des objets 3D. Nous présenterons ensuite des cas d'utilisation afin de montrer le rôle des modèles au sein d'applications concrètes traitant de la reconstruction 3D, la déformation ou la simulation physique. Nous nous intéresserons enfin à la problématique de l'échange de ces données 3D, que ce soit pour des applications en CAO, liées à des codes de calculs physiques, ou pour les Systèmes d'Informations Géographiques. |  |
 |
 |