Mon travail de recherche concerne la robotique sous-marine et il est caractérisé par la validation expérimentale systématique des concepts théoriques proposés.
Domaines de recherche
perception, localisation et modélisation, par vision ou sonar.
commande en temps-réel (non linéaire, adaptative, robuste)
interaction avec l’environnement et manipulation (outils et méthodes de prélèvement)
Estimation des efforts
coordination de véhicules
conception et modélisation de systèmes robotiques
câbles sous-marins (ombilicaux et robots à câbles)
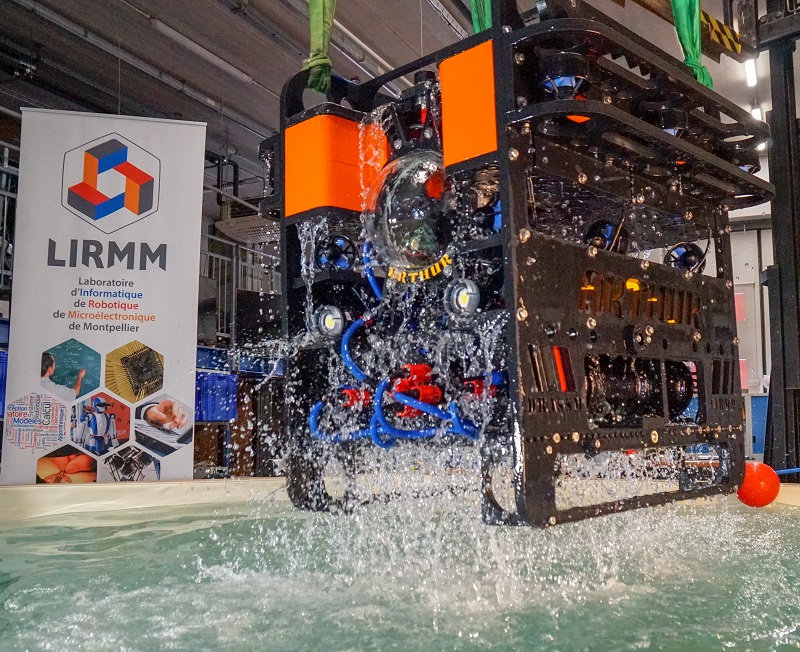
Le ROV archéologue Arthur (2021), immersion maximale : 2500 mètres.
Applications
archéologie sous-marine
biologie marine
industrie
En bref...
8 prototypes développés et utilisés en mer et en laboratoire
plus de 40 missions en mer et plus de 450 plongées robots
implication dans 19 projets nationaux ou internationaux
12 thèses en cours ou soutenues
plus de 70 publications scientifiques dans ce domaine