

DEXTER team
Design and control of robotic manipulators
The DEXTER team aims to design, build and control high-performance robots capable of fine, rapid and/or precise gestures. To achieve these objectives, fundamental research activities are systematically coupled with realistic experimental validations, facilitating their valorization by industry or the medical sector. The team’s scientific themes include mechanical design methodologies, the proposal of original performance indices, the development of estimation protocols and the synthesis of sensor-based (effort/vision) and/or model-based (predictive, adaptive) control strategies.
Focusing on innovation within a mechatronic approach, the team’s major contributions are in two main areas:
- Medical robotics, from personal assistance to surgeon assistance, link to the robChir platform website: https://www.lirmm.fr/robmed-plateforme/index.html
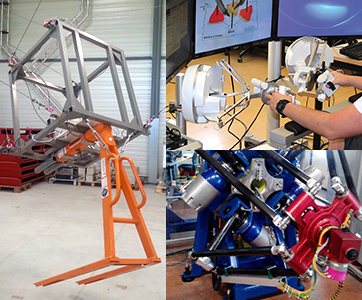
- Parallel robotics for demanding industrial applications in terms of speed, precision, workspace dimensions and/or mass of loads transported.
Staff
Nabil Zemiti, Professeur des universités, UM
François Pierrot, Directeur de recherche, CNRS
Ahmed Chemori, Chargé de recherche, CNRS
Marc Gouttefarde, Directeur de recherche, CNRS
Sébastien Krut, Chargé de recherche, CNRS
Olivier Company, Maître de conférences, UM
Yassine Haddab, Professeur des universités, UM
Salih Abdelaziz, Maître de conférences, UM
Philippe Poignet, Professeur des universités, UM
Cedric Girerd, Chargé de recherche, CNRS
Chao Liu, Chargé de recherche, CNRS
Lucas Lavenir, Ingénieur de recherche, CNRS
Associates and Students
Juliana Castelo Branco Dreyer, CNRS
Felipe Marques Farias Filho, SYMETRIE
Alexandre Thuillier, UM
Pierre-Emmanuel Chammas, CHU Mtp
Romaric Bouquinet, CNAM Paris
Teddy Baylet, CNRS
Camille Benoist, CARANX MEDICAL
Youcef Aouf, U Tallin
Chenji Li, UM
Baptiste Mereaux, euroDAO
Idris Hammouche, U Tallin
Lilian Delaunay, CNRS
Lénaïc Cuau, UM
Clement Robert, CNRS
Regular Co-workers
Nicolas Testard, CDD Chercheur, CNRS
Ana Tacuri, CDD Ingénieur-Technicien, CNRS
Tho Dang Huu, CDD Ingénieur-Technicien, UM
Wenlin Zhang, CDD Ingénieur-Technicien, CNRS
Ibrahim Ali Mohammed Seleem, CDD Chercheur, UM
Ahmed Nassim Bellila, Doctorant externe, polytechnique Clermont Auvergne
Suranjana Bose, CDD Ingénieur-Technicien, CNRS
The DEXTER team’s research focuses on two topics:
- Medical robotics
- Parallel robotics
- Cédric Girerd , Anna Alvarez , Elliot Hawkes et Tania Morimoto . « Material Scrunching Enables Working Channels in Miniaturized Vine‐Inspired Robots ». In : IEEE Transactions on Robotics, 2024.
- João Cavalcanti Santos , Marc Gouttefarde et Ahmed Chemori . « A Nonlinear Model Predictive Control for the Position Tracking of Cable‐Driven Parallel Robots ». In : IEEE Transactions on Robotics, 2022.
- Lucas Lavenir , João Cavalcanti Santos , Nabil Zemiti , Akil Kaderbay , Frederic Venail et Philippe Poignet . « Miniaturized endoscopic 2D US transducer for volumetric ultrasound imaging of the auditory system ». In : IEEE Transactions on Biomedical Engineering, 2023.
- Mouna Ben Salem , Guillaume Aiche , Yassine Haddab , Lennart Rubbert et Pierre Renaud . « Microbiota Sampling Capsule : Design, Prototyping and Assessment of a Sealing Solution Based on a Bistable Mechanism ». In : Journal of Medical Devices, 2022.
- Benjamin Calmé , Lennart Rubbert et Yassine Haddab . « Towards a Discrete Snake‐like Robot Based on SMA actuated Tristable Modules For Follow The Leader Control Strategy ». In : IEEE Robotics and Automation Letters, 2023.
Title: Approches d’apprentissage automatique pour la détection et la classification des déchets dans les vidéos sous-marines en vue du nettoyage robotisé des fonds marins.
PhD defendant: Cyril Barrelet
Defense date: 2025-09-23
Thesis directors:
Marc Chaumont,
Marc Gouttefarde
Title: Développement dun Robot Souple pour la Navigation et lInspection dans des Environnements Tubulaires Confinés et Non Structurés.
PhD defendant: Zeinab Awada
Defense date: 2025-07-11
Thesis directors:
Yassine Haddab,
Marc Gouttefarde
Title: Développement des ostéotomies robot-assistées sur lambeau libre de fibula en reconstruction mandibulaire : de la planification aux ostéotomies guidées.
PhD defendant: Marie De Boutray
Defense date: 2024-12-12
Thesis director:
Philippe Poignet
Title: Commande robuste/adaptative pour lamélioration des performances des robots à structure parallèle de haute précision
PhD defendant: Youcef Mohamed Fitas
Defense date: 2024-11-29
Thesis director:
François Pierrot
Title: Contributions à la modélisation et la commande de véhicules sous-marins autonomes actionnés par des nageoires
PhD defendant: Mohamed Walid Remmas
Defense date: 2023-12-18
Thesis directors:
François Pierrot,
Kruusmaa Maarja
Title: Intégration de fonctions pour lendoscopie par conception de mécanismes multistables produits par fabrication additive
PhD defendant: Benjamin Calme
Defense date: 2023-03-17
Thesis director:
Yassine Haddab
Title: Commande dun Robot Parallel pour des Tâches de Pick-and-Throw à Haute Cadence en Tri Sélectif
PhD defendant: Ghina Hassan
Defense date: 2022-12-12
Thesis director:
Marc Gouttefarde
Title: Contribution à la Commande Robuste Non Linéaire pour le Suivi de Trajectoire des Robots Sous-Marins de Petite Taille: Du Concept aux Expérimentations Temps Réel
PhD defendant: Auwal Tijjani Shehu
Defense date: 2021-12-16
Thesis director:
Vincent Creuze
Title: Aide au geste chirurgical pour la pose de neuroprothèses auditives par fusion dimages US/CT
PhD defendant: Lucas Lavenir
Defense date: 2021-12-15
Thesis director:
Philippe Poignet
Title: Conception et commande de mécanismes de tenségrité pour des applications en radiologie interventionnelle
PhD defendant: Jr Martin Jurado Realpe
Defense date: 2021-06-29
Thesis director:
Philippe Poignet
Title: Urétéroscopie flexible téléopérée pour le traitement des pathologies du haut appareil urinaire avec compensation des mouvements physiologiques
PhD defendant: David Cavard
Defense date: 2020-12-17
Thesis director:
Philippe Poignet
Title: Commande Prédictive des Robots Parallèles à Câbles : du Concept à la Validation Temps-Réel
PhD defendant: Joao Cavalcanti Santos
Defense date: 2020-10-05
Thesis director:
Marc Gouttefarde
Title: Optimisation orientée application de l’étalonnage élastostatique de robots: Implémentation pour des hexapodes de positionnement précis
PhD defendant: Vinayak Kalas
Defense date: 2020-09-18
Thesis director:
François Pierrot
Title: Développement d’une capsule de prélèvement de microbiote intestinal utilisant un mécanisme bistable et exploitant la fabrication additive.
PhD defendant: Mouna Ben Salem
Defense date: 2020-06-19
Thesis director:
Yassine Haddab
Title: Sur la commande des robots parallèles pour des performances dynamiques à haute cadence: De la conception à la validation expérimentale
PhD defendant: Hussein Saied
Defense date: 2019-11-29
Thesis directors:
Clovis Francis,
François Pierrot
Title: Optimisation de la propulsion d’un véhicule sous-marin à propulseurs orientables
PhD defendant: Maxence Blond
Defense date: 2019-05-21
Thesis director:
Daniel Simon
Title: Conception, optimisation et commande d’un stablisateur actif pour la compensation des vibrations des robots parallèles à câbles
PhD defendant: Maximilien Lesellier
Defense date: 2019-02-27
Thesis director:
Marc Gouttefarde
Title: Dynamique linéarisée totale : Application aux robots parallèles
PhD defendant: Julien Prades
Defense date: 2018-11-27
Thesis director:
François Pierrot
Title: Contributions à la commande de bras manipulateurs de robot sous-marin pour la manipulation à grande profondeur d’échantillons biologiques déformables
PhD defendant: François Leborne
Defense date: 2018-11-16
Thesis director:
Vincent Creuze
Title: Modélisation, étude et commande d’un robot sous-marin à câbles
PhD defendant: Gamal Elghazaly
Defense date: 2017-06-12
Thesis director:
François Pierrot
Démonstrateur du projet ANR DexterWide : robot parallèle à câbles CoGiRo équipé d’un stabilisateur pour la compensation active de vibrations.
Démonstrateur du projet ANR DexterWide : robot parallèle à câbles CoGiRo équipé d’un robot SIA20 perçant dans le béton