
En 5 minutes, découvrez le cœur du projet I-ROBI, son objectif et son approche innovante : voir sur YouTube.
Contexte
Depuis plusieurs années, la recherche explore l’apport des robots sociaux comme outils d’intervention auprès des enfants atteints de troubles du spectre autistique (TSA).
En France, l’Agence nationale de santé recommande notamment le modèle d’intervention précoce Early Start Denver, qui repose sur des activités ludiques, individualisées et intensives, choisies par l’enfant.
Si plusieurs études suggèrent que les robots peuvent favoriser l’apprentissage des compétences sociales en milieu clinique, les résultats restent encore hétérogènes et peu généralisables. La question du maintien des effets à long termedemeure également ouverte.
Dans cette perspective, l’équipe I-ROBI explore une nouvelle approche : l’utilisation d’un robot interactif télécommandé par un praticien, permettant une adaptation en temps réel aux réactions et choix de l’enfant. Cette solution vise à renforcer la motivation sociale des enfants et à mieux évaluer les progrès dans les domaines clés de la communication expressive et de l’imitation.
Méthodologie
L’étude I-ROBI est une étude pilote prospective, monocentrique, descriptive et évaluative, reposant sur une méthodologie de conception expérimentale à cas unique (SCED).
- Participants : 8 enfants de 2 à 5 ans diagnostiqués avec un TSA.
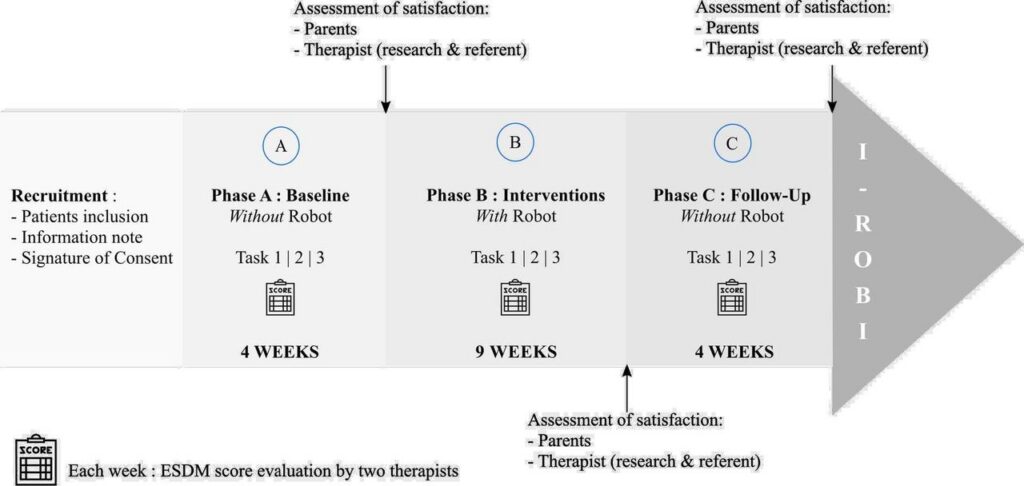
- Déroulement :
- (A) 4 séances hebdomadaires sans robot (phase de référence),
- (B) 9 séances hebdomadaires intégrant un robot social comme co-thérapeute,
- (C) 4 séances hebdomadaires sans robot pour le suivi.
- Chaque intervention dure 15 minutes et s’ajoute aux soins hebdomadaires habituels.
Ce protocole permettra d’évaluer l’impact du robot sur l’engagement des enfants, leur communication et leurs compétences sociales.
Enjeux scientifiques
Les études antérieures⁷⁻⁹ montrent que les robots sociaux peuvent soutenir l’apprentissage des compétences de communication sociale. Certaines suggèrent même des effets durables¹⁰. Toutefois, le nombre de recherches reste limité¹¹⁻¹² et ne prend pas toujours en compte l’hétérogénéité des profils TSA, ni la nécessité de solutions adaptables, personnalisables et contrôlées par le praticien¹³.
L’hypothèse centrale d’I-ROBI est qu’un robot interactif téléopéré peut constituer un outil thérapeutique pertinent pour stimuler la motivation sociale par le jeu et enrichir les interventions de type Denver.
Équipe de recherche
- Carole Fournier¹, Cécile Michelon², Véronique Granit², Paul Audoyer², Arielle Bernardot², Marie-Christine Picot³˒⁴, Abderrahmane Kheddar¹˒⁵, Amaria Baghdadli²˒⁴˒⁶
- ¹ LIRMM, UMR5506 CNRS – Université de Montpellier, France
- ² Centre Ressources Autisme Languedoc-Roussillon & CeAND, CHU de Montpellier, France
- ³ Unité de recherche clinique et d’épidémiologie, CHU de Montpellier, Université de Montpellier, France
- ⁴ Faculté de Médecine, Université de Montpellier, France
- ⁵ Université Paris-Saclay, UVSQ, Inserm, CESP, Équipe DevPsy, Villejuif, France
- ⁶ IRL3218 CNRS-AIST Joint Robotics Laboratory, Tsukuba, Japon
Le protocole de l’étude I-ROBI vient d’être publié dans la revue BMJ Open : consulter l’article en ligne.



