Présentation
 Les mers et les océans sont des domaines d’étude cruciaux au 21ème siècle. En particulier, la protection des stocks de poissons, le suivi des espèces, la surveillance de la biodiversité, le développement des énergies marines renouvelables, l’anticipation et la détection des évènement climatiques, la dépollution des fonds marins ou encore la protection du patrimoine immergé sont des thèmes majeurs pour la société et pour les chercheurs. Pour répondre à ces enjeux, les scientifiques unissent leurs efforts dans des approches pluridisciplinaires, comme en témoigne la création récente au CNRS d’un Groupement de Recherche dédié à ces questions (GdR OMER).
Les mers et les océans sont des domaines d’étude cruciaux au 21ème siècle. En particulier, la protection des stocks de poissons, le suivi des espèces, la surveillance de la biodiversité, le développement des énergies marines renouvelables, l’anticipation et la détection des évènement climatiques, la dépollution des fonds marins ou encore la protection du patrimoine immergé sont des thèmes majeurs pour la société et pour les chercheurs. Pour répondre à ces enjeux, les scientifiques unissent leurs efforts dans des approches pluridisciplinaires, comme en témoigne la création récente au CNRS d’un Groupement de Recherche dédié à ces questions (GdR OMER).
Au LIRMM, les chercheurs de plusieurs équipes d’informatique, de robotique et de microélectronique appliquent leurs travaux à l’exploration et la caractérisation du milieu marin, depuis les zones côtières jusqu’aux zones océaniques les plus reculées de la planète, en développant des outils innovants dans le cadre de collaborations avec des biologistes, écologues, archéologues, chimistes ou mécaniciens.
En 2024, l’axe transverse Mer & Océan rassemble 23 chercheurs et enseignants-chercheurs et environ 14 doctorants et post-doctorants.
Spécificités du LIRMM
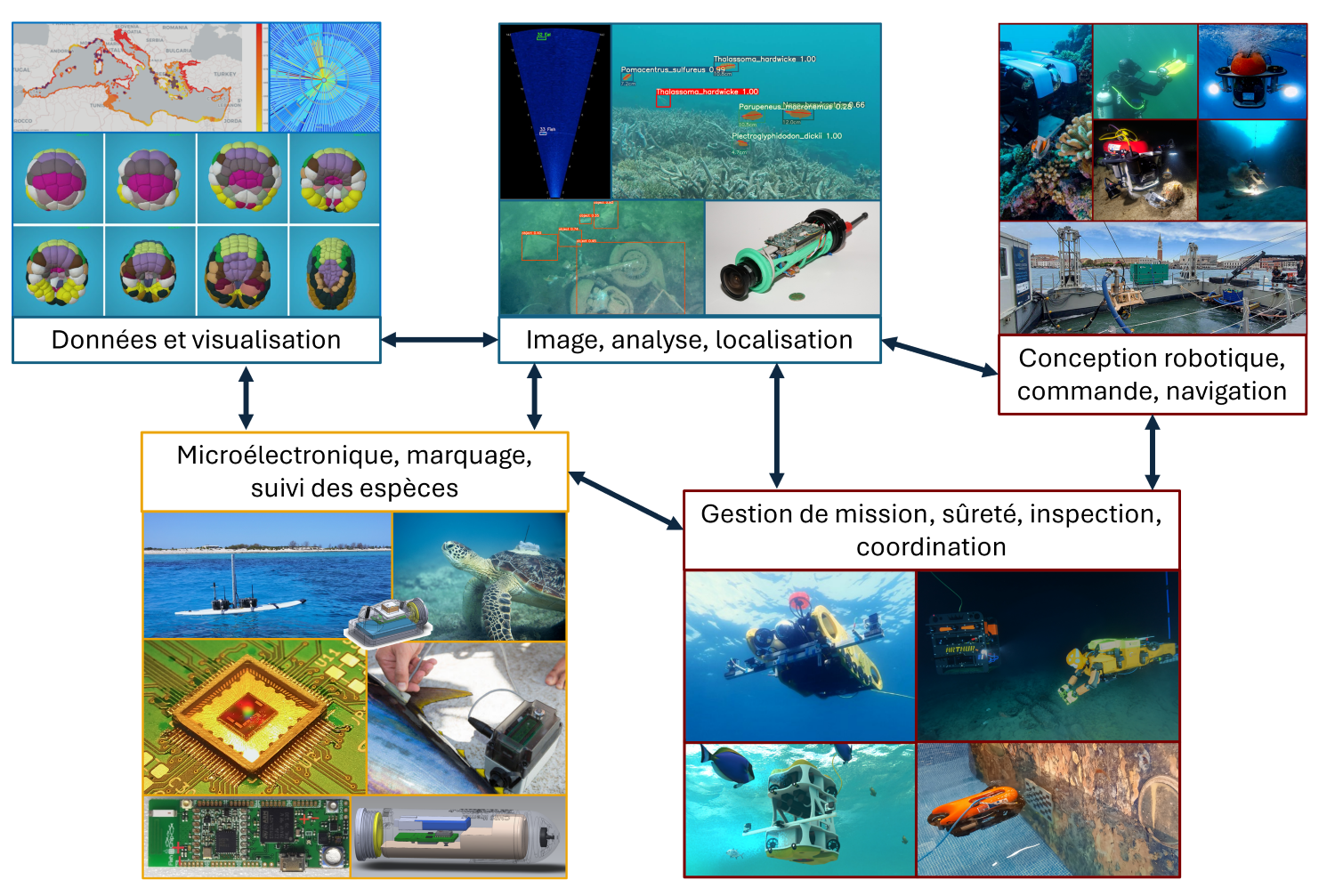
Les recherches s’articulent autour des thèmes suivants :
- Les systèmes microélectroniques de marquage et de suivi des espèces marines par communication satellite ou Lora, avec mesure in vivo de paramètres physiologiques.
- Les algorithmes de traitement des images vidéo ou acoustiques par intelligence artificielle pour l’identification des espèces sous-marines, le comptage de poissons, ou encore la détection des déchets sous-marins.
- Les algorithmes de localisation et de cartographie automatiques à partir d’images vidéo et acoustiques.
- La conception et la commande de robots sous-marins dédiés à l’archéologie, l’observation des écosystèmes, la dépollution des fonds marins ou l’inspection d’éoliennes flottantes, y compris dans des conditions de mer difficiles (vagues, courants).
- Les outils de définition, de programmation et de gestion de missions robotiques autonomes, d’exploration ou de surveillance de l’environnement, y compris des outils traitant de la fiabilité et de la performance de ces systèmes.
- La construction de jeux de données originaux à partir de données de sciences participatives et la proposition d’outils de visualisation prenant en compte les incertitudes sur ces données (application à la modélisation des déplacements des méduses ou encore à la génération d’indicateurs de santé).