


Équipe DEXTER
Design and control of robotic manipulators
L’équipe DEXTER se donne pour objectifs de concevoir, réaliser et commander des robots performants capables de gestes fins, rapides et/ou précis. Pour atteindre ces objectifs, les activités de recherche fondamentales sont systématiquement couplées à des validations expérimentales réalistes facilitant leur valorisation auprès de l’industrie ou du secteur médical. Les thèmes scientifiques de l’équipe incluent des méthodologies de conception mécanique, la proposition d’indices de performance originaux, le développement de protocoles d’estimation et la synthèse de commandes référencées capteur (effort/vision) et/ou modèle (prédictive, adaptative).
Privilégiant l’innovation au sein d’une démarche essentiellement mécatronique, les contributions majeures de l’équipe portent sur deux grands domaines :
- Robotique médicale allant de l’assistance à la personne à l’assistance au chirurgien, lien vers le site de la plateforme robChir : https://www.lirmm.fr/robmed-plateforme/index.html
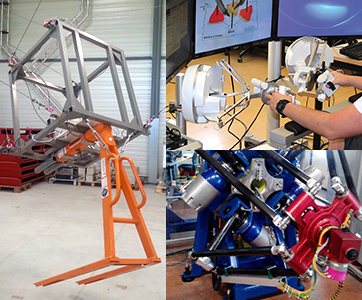
- Robotique parallèle pour des applications industrielles exigeantes en termes de vitesses, précision, dimensions de l’espace de travail et/ou masses des charges transportées
Permanents
Nabil Zemiti, Professeur des universités, UM
François Pierrot, Directeur de recherche, CNRS
Ahmed Chemori, Chargé de recherche, CNRS
Marc Gouttefarde, Directeur de recherche, CNRS
Sébastien Krut, Chargé de recherche, CNRS
Olivier Company, Maître de conférences, UM
Yassine Haddab, Professeur des universités, UM
Salih Abdelaziz, Maître de conférences, UM
Philippe Poignet, Professeur des universités, UM
Cedric Girerd, Chargé de recherche, CNRS
Chao Liu, Chargé de recherche, CNRS
Lucas Lavenir, Ingénieur de recherche, CNRS
Doctorants
Juliana Castelo Branco Dreyer, CNRS
Felipe Marques Farias Filho, SYMETRIE
Alexandre Thuillier, UM
Pierre-Emmanuel Chammas, CHU Mtp
Romaric Bouquinet, CNAM Paris
Teddy Baylet, CNRS
Camille Benoist, CARANX MEDICAL
Youcef Aouf, U Tallin
Chenji Li, UM
Baptiste Mereaux, euroDAO
Lilian Delaunay, CNRS
Lénaïc Cuau, UM
Autres personnels
Nicolas Testard, CDD Chercheur, CNRS
Ana Tacuri, CDD Ingénieur-Technicien, CNRS
Tho Dang Huu, CDD Ingénieur-Technicien, UM
Wenlin Zhang, CDD Ingénieur-Technicien, CNRS
Ibrahim Ali Mohammed Seleem, CDD Chercheur, UM
Ahmed Nassim Bellila, Doctorant externe, polytechnique Clermont Auvergne
Suranjana Bose, CDD Ingénieur-Technicien, CNRS
Les travaux de recherche de l’équipe DEXTER concernent deux thématiques :
- Robotique médicale
- Robotique parallèle
- Cédric Girerd , Anna Alvarez , Elliot Hawkes et Tania Morimoto . « Material Scrunching Enables Working Channels in Miniaturized Vine‐Inspired Robots ». In : IEEE Transactions on Robotics, 2024.
- João Cavalcanti Santos , Marc Gouttefarde et Ahmed Chemori . « A Nonlinear Model Predictive Control for the Position Tracking of Cable‐Driven Parallel Robots ». In : IEEE Transactions on Robotics, 2022.
- Lucas Lavenir , João Cavalcanti Santos , Nabil Zemiti , Akil Kaderbay , Frederic Venail et Philippe Poignet . « Miniaturized endoscopic 2D US transducer for volumetric ultrasound imaging of the auditory system ». In : IEEE Transactions on Biomedical Engineering, 2023.
- Mouna Ben Salem , Guillaume Aiche , Yassine Haddab , Lennart Rubbert et Pierre Renaud . « Microbiota Sampling Capsule : Design, Prototyping and Assessment of a Sealing Solution Based on a Bistable Mechanism ». In : Journal of Medical Devices, 2022.
- Benjamin Calmé , Lennart Rubbert et Yassine Haddab . « Towards a Discrete Snake‐like Robot Based on SMA actuated Tristable Modules For Follow The Leader Control Strategy ». In : IEEE Robotics and Automation Letters, 2023.
curlGET failed, http-code: 502
Démonstrateur du projet ANR DexterWide : robot parallèle à câbles CoGiRo équipé d’un stabilisateur pour la compensation active de vibrations.
Démonstrateur du projet ANR DexterWide : robot parallèle à câbles CoGiRo équipé d’un robot SIA20 perçant dans le béton